|
|||||||||||||||||||||||||||||||||||||||||||||||
|
УНИВЕРСАЛЬНАЯ ЗЕНИТНАЯ РАКЕТНАЯ СИСТЕМА С-300В  Необходимость разработки зенитно-ракетной системы (ЗРС) С-300В определялась, в основном, стремлением обеспечить прикрытие важнейших объектов Сухопутных войск от ударов тактических и оперативно-тактических баллистических ракет (БР) противника. Ожидалось, что в ходе операции противником может быть применено до 320 ракет "Ланс", до 150 – "Сержант" и до 350 – "Першинг" с максимальной дальностью стрельбы 75, 140 и 740 км соответственно. В начале шестидесятых годов в научно-исследовательской работе (НИР) "Защита" впервые были исследованы возможности использования в целях ПРО СВ разрабатываемых войсковых противосамолетных ЗРК первого поколения и проведены экспериментальные стрельбы по БР комплексом "Круг" с дополнительным каналом полуактивного самонаведения, обеспечивающим малые промахи на конечном участке траектории ЗУР. Эти стрельбы показали принципиальную возможность борьбы с БР "Ланс" и "Сержант" с помощью ЗРК, однако для решения задачи ПРО применительно к защите от БР "Першинг" требовалось создание комплекса нового поколения на базе высокопотенциальных радиолокационных станций обнаружения целей и наведения, а также ЗУР с высокими энергетическими характеристиками. В 1963-1964 гг. при проведении НИР "Бином" было определено, что прикрытие объектов Сухопутных войск наиболее целесообразно осуществлять совместным применением перспективных ЗРК трех типов, условно обозначенных "А", "Б" и "В", из которых последний являлся бы противосамолетным, а "А" и "Б" – универсальными, способными решать задачи как противосамолетной ПВО, так и ПРО. При этом наибольшими боевыми возможностями, включая способность поражать головные части (ГЧ) ракет "Першинг" должен был обладать комплекс "А". Предполагалось, что для ЗРК "А" будет создана ракета, по массе и габаритам близкая к ЗУР комплекса "Круг", но имеющая примерно вдвое большую среднюю скорость полета и за счет этого способная осуществить перехват головной части ракеты "Першинг" на высотах более 12 км при ожидаемых временах обнаружения и взятия на сопровождение баллистической цели. При этом даже при подрыве ядерного заряда головной части мощностью 1,5 Мт потери открыто расположенной живой силы ограничивались допустимым уровнем 10%, а с учетом более реального нахождения большинства людей в бронеобъектах и различных укрытиях – намного меньшей величиной. Особые трудности вызывало решение задачи обнаружения баллистических целей и наведения на них ЗУР (противоракет). Оно требовало создания высокопотенциальных радиолокационных средств нового поколения. По результатам ряда экспериментальных работ было установлено, что по сравнению с самолетами ЭПР отделяющихся головных частей БР "Першинг" на два порядка меньше. Повышение потенциалов радиолокационных станций за счет роста их энерговооруженности неизбежно вело к существенному увеличению габаритов и массы РЛС, что ограничивало их мобильность и подвижность. Повышение чувствительности приемника РЛС приводило к ухудшению помехоустойчивости радиолокационных станций. Необходимо было найти компромиссное решение – приемлемые мощности передатчика и чувствительность приемника РЛС обнаружения и наведения. Исходя из ожидаемого расхода баллистических ракет с ядерными боевыми частями в первом ударе противника по важнейшим объектам фронта было определено, что для ЗРК типа "А" должно быть одновременно задействовано в режиме ПРО как минимум 3-4 целевых канала. Таким образом, желательно было иметь многофункциональные и многоканальные станции наведения ракет (МСНР), обеспечивающие быстрый автономный (или по данным целеуказания) поиск и обнаружение БР в секторе их возможного появления, сопровождение нескольких ракет и обстрел ряда из них противоракетами. При этом все элементы ЗРК (РЛС раннего обнаружения и целеуказания, многоканальная станция наведения, пусковые установки с ЗУР) должны были быть высокомобильными (самоходными, со средствами навигации, топопри- вязки и ориентирования, связи и передачи данных, с автономными встроенными источниками электропитания). Возможности по дальней границе зоны поражения ЗРК ограничивались допустимой массой многоканальной станции наведения ракет. Было принято, что все основные элементы ЗРК "А" должны располагаться на самоходных шасси высокой проходимости с полной массой не более 40-45 т, (предельной по проходимости по мостам и эстакадам). Имевшиеся и разрабатываемые колесные шасси не могли быть приняты как базы для ЗРК "А", поэтому в качестве самоходной базы предполагалось использовать шасси тяжелого танка. При этом можно было располагать общей массой радиоэлектронной аппаратуры (передающая, приемная, индикаторная, вычислительная, управляющая и другая) вместе с аппаратурой связи, передачи данных и автономным источником питания порядка 20-25 т. В качестве основополагающего технического решения многоканальной станции наведения ракет была выбрана когерентно-импульсная РЛС сантиметрового диапазона волн с пассивной фазированной антенной решеткой (ФАР), работающей "на просвет" от рупорного излучателя передающего устройства, который в режиме приема отраженных сигналов подключался к приемному устройству. Электронное сканирование луча шириной около 1° (в азимутальной и угломестной плоскостях) осуществлялось цифровой системой управления лучом, которая изменяла фазу передаваемой (принимаемой) высокочастотной энергии, проходящей через каждый элемент решетки, содержащий фазовращатель, сопряженный с данной системой. Система должна была обеспечивать поиск и сопровождение целей в пределах ±45° по азимуту и по углу места относительно нормали к плоскости ФАР, которая выставлялась под углом 45° к горизонту за счет наклона относительно плоскости земли. Образуемый таким образом сектор поиска позволял производить обнаружение и сопровождение БР с любыми углами падения и обеспечивал достаточный охват направлений пуска БР по прикрываемому объекту (90° по азимуту). Поиск и сопровождение целей предполагалось осуществлять по программе, которая обеспечивала бы более частое обращение луча при поиске в направления ожидаемых траекторий БР и в приземные направления для своевременного обнаружения низколетящих целей, а при сопровождении обстреливаемых целей – в направления этих целей и наводимых на них ЗУР. Последнее должно было осуществляться совместной работой системы управления лучом со следящими цифровыми системами (пролонгаторами движения целей и ЗУР) многоканальной станции наведения ракет. В станции предполагалось использование моноимпульсного метода радиолокации. Поиск и обнаружение целей должны были проводиться суммарной диаграммой направленности и соответствующим каналом приемного устройства, сопровождение – суммарными (при излучении) и разностными (при приеме) диаграммами и соответствующими каналами входной части приемника. Суммарные диаграммы направленности и соответствующие каналы приемника обеспечивали наибольшие дальности обнаружения цели. Та же диаграмма направленности обеспечивала наибольшую энергию облучения цели при сопровождении, что повышало дальность сопровождения цели разностными каналами приемника. Разностные диаграммы направленности и каналы приемного устройства позволяли получить высокую точность определения угловых координат сопровождаемых целей и ЗУР, присущую моноимпульсному методу радиолокации. При поиске предполагалось использовать импульсы большой длительности с большой энергией. При сопровождении – пачки очень узких сигналов (двойной дискретности), обеспечивающие высокую энергетику, хорошие разрешающую способность и точность сопровождения цели и ЗУР (по дальности и по скорости). Все это позволяло сочетать в станции большую дальность действия и хорошую точность сопровождения целей, обеспечить эффективную защиту от активных и пассивных помех и возможность распознавания целей по сигнальным и динамическим признакам. Проведенные расчеты показали, что при средней мощности передатчика около 10 кВт, чувствительности приемного устройства порядка 10"14 Вт и ширине луча в 1° многоканальная станция наведения ракет ЗРК "А" обеспечит приемлемые дальности обнаружения БР и самолетов, зоны прикрытия от БР и поражения самолетов, канальность по целям и ЗУР. В соответствии с результатами НИР "Бином" в 1965 г. были разработаны тактико-техническое задание и исходные данные на разработку универсального войскового ЗРК типа "А". Разработка аванпроекта такого ЗРК под шифром "Призма" проводилась под руководством В.М.Свистова в НИИ-20 Министерства радиопромышленности по тому же решению ВПК, что и универсальный вариант ЗРК "Круг- М". Рассматривались два варианта ЗРК. Первый вариант комплекса включал в себя: 1. Командный пункт с узлом связи, которые размещались на 3-4 транспортных единицах. 2. Многофункциональную РЛС с ФАР и рабочим сектором 60°-70° по азимуту и по углу места, размещаемую на 2-3 транспортных единицах. РЛС должна была осуществлять: – обнаружение, захват и сопровождение целей; – распознавание классов целей (самолеты или БР); – селекцию отделяющихся головных частей БР на фоне ложных целей; – экстраполяцию траектории БР для определения точки падения; – управление станциями подсвета целей, обеспечивающими самонаведение ЗУР-1 (на конечном участке траектории) и выдачу целеуказания РЛС распознавания и командного наведения ракет (на начальном и среднем участках траектории); – управление ЗУР-1 на траектории до захвата цели головкой самонаведения. 3. Станции определения государственной принадлежности целей, работающие в единой системе опознавания. 4. Станции подсвета целей, обеспечивающие захват целей ГСН ЗУР-1. 5. ЗУР-1 массой 5-7 т с комбинированной системой наведения (для поражения БР и самолетов). 6. ЗУР-2 массой 3-3,5 т с командной системой наведения (для поражения самолетов). 7. Пусковые установки двух типов (с ЗУР-1 и с ЗУР-2). 8. РЛС распознавания целей и командного наведения. Второй, упрощенный вариант комплекса не предусматривал применения самонаведения для ЗУР-1. Общее количество целевых каналов в комплексе-"Призма" можно было довести до шести (при увеличении числа РЛС распознавания и точного наведения, а также количества пусковых установок с ЗУР-1 и ЗУР-2). Общее количество транспортных единиц при трех целевых каналах в комплексе "Призма" составляло 25- 27, что делало его структуру очень громоздкой, а сам комплекс – очень дорогостоящим. Однако все основные проблемы создания войскового ЗРК ПРО в проекте были принципиально решены. Такой вывод был сделан в поставленной ГРАУ в 1967 г. в 3 НИИ МО специальной НИР "Ромб", основной целью которой являлись оценка аванпроекта комплекса "Призма" и разработка на его основе проекта ТТЗ на ОКР по созданию комплекса в приемлемых для войск ПВО СВ структуре и стоимости. Несмотря на перенасыщенность аванпроекта комплекса "Призма" различными средствами, следует отметить, что разработанные под руководством В.М. Свистова в НИР "Призма" основные технические решения войскового противоракетного комплекса и сам аванпроект были прежде всего реальным доказательством возможности создания универсального войскового комплекса. В этом поначалу было трудно убедить руководство военно-промышленного комплекса страны и особенно генерального конструктора комплексов ПРО в системе ПВО страны Г.В. Кисунько, категорически отрицавшего такую возможность на основе предложенных В.М. Свистовым решений (мобильной РЛС с ФАР, двух ЗУР и т. д.). Только благодаря поддержке министра радиопромышленности В.Д. Калмыкова, генерального конструктора ЗРК Войск ПВО страны А.А. Расплетина и директора НИИ-20 Минрадиопрома (МРП) П.М.Чудакова удалось защитить упомянутый аванпроект, а в дальнейшем создать самоходную войсковую ЗРС С-300В. С другой стороны, по инициативе командования Войск ПВО страны и КБ-1 МРП в это время рассматривалось предложение по созданию унифицированной для трех видов ВС СССР – Войск ПВО страны, Сухопутных войск и ВМФ противосамолетной зенитной ракетной системы С-500У с дальней границей зоны поражения порядка 100 км, что соответствовало требованию по поражению самолетов комплексами типа "А" или "Призма". Только благодаря внимательному отношению Научно-технического комитета Генерального штаба ВС и прежде всего одного из его сотрудников – руководителя направления по ЗРК Р.А. Валиева, удалось организовать обсуждение этого предложения с заказчиками от трех видов ВС СССР и убедить всех участников этого обсуждения, что предлагаемая для войск ПВО С В модификация системы С-500У будет рациональной только в том случае, если она сможет в требуемой мере обеспечить ПРО. Последнее не требовалось в то время ни для Войск ПВО страны, ни для Военно-Морского флота, но вызывало необходимость решения ряда дополнительных сложных технических проблем. С учетом результатов нелегких всесторонних обсуждений предложений по системе С-500У Постановлением ЦК КПСС и СМ СССР от 27 мая 1969 г. была задана разработка для трех видов ВС СССР по единым ТТТ максимально унифицированной зенитной ракетной системы аналогичного типа, получившей новое название С-300. МКБ "Стрела" (бывшее КБ-1 МРП, в дальнейшем вошедшее в НПО "Алмаз") создавало противосамолетную систему С-300П для Войск ПВО страны, ВНИИ РЭ Минсудпрома (в дальнейшем – НИИ "Альтаир") – комплекс С-300Ф для ВМФ, а НИЭ МИ МРП (бывший НИИ-20 МРП, впоследствии вошедший в НПО "Антей") – универсальную противоракетную и противосамолетную систему) С-300В для войск ПВО СВ. Предусматривалось, что во всех унифицированных комплексах для обеспечения противосамолетной обороны от целей, летящих со скоростями до 3500 км/час на высотах от 25 до 25000 м, при дальностях от 6 до 75 км будет использоваться разрабатываемая МКБ "Факел" МАП (главный конструктор В.П. Грушин) ЗУР B-500P с комбинированной системой наведения. В качестве первого этапа создавалась упрощенная и значительно более дешевая ЗУР В-500К с радиокомандной системой наведения для применения на дальностях до 50 км. Специально для решения задач ПРО в системе С-300В Свердловским машиностроительным КБ "Новатор" МАП (бывшее ОКБ-8 ГКАТ, главный конструктор ракеты Л.В. Люльев, затем В.А. Смирнов) разрабатывалась ракета КС-96 для поражения целей на высотах до 35 км. При этом обеспечивалось прикрытие от ракет "Першинг" района площадью 300 км² . Однако глубокой межвидовой унификации средств ЗРС С-300 достичь не удалось. В системах С-300В и С-300П были унифицированы при мерно на 50% на уровне функциональных устройств только РЛС обнаружения командного пункта – узла управления системы. В зенитно-ракетных системах войск ПВО страны и ВМФ использовалась единая ЗУР разработки П.Д.Грушина. В процессе разработки создатели системы С-300В отказались от применения ЗУР разработки двух разных КБ, отдав предпочтение противосамолетному варианту ракеты Л.В.Люльева. Основные средства модификаций системы С-300 для различных видов Вооруженных сил (кроме созданной НИИИП МРП РЛС кругового обзора в системах С-300В и С- 300П и разработанной МКБ "Факел" МАП ЗУР в системах С-300П и С-300Ф) разрабатывались различными предприятиями промышленности, использовавшими свои комплектующие изделия, свои технологии, обеспечивавшими различные эксплуатационные требования заказчиков (ПВО страны, войск, флота) к этим средствам. Позже, в конце восьмидесятых годов заказчики и разработчики ЗРС С-300П убедились, что и для защиты объектов территориальной ПВО от оперативно-тактических БР требуется мобильная универсальная зенитная ракетная система. После этого начались работы по созданию такой системы, получившей название С-300ПМУ. Войсковая самоходная зенитная ракетная система С-300В разрабатывалась в соответствии с общими (едиными) ТТТ к системе С- 300, частными ТТТ к системе С- 300В, дополнениям к ТТТ к системе С-300В, дополнению к ТТТ к РЛС "Обзор-3", используемой в качестве РЛС кругового обзора в этой системе, ТТЗ на разработку РЛС программного обзора "Имбирь" и дополнению к нему. В соответствии с ТТТ ЗРС С- 300В должна была являться фронтовым средством ПВО и предназначалась для поражения баллистических ракет наземного (типа "Ланс", "Першинг") и авиационного (типа SRAM) базирования, крылатых ракет, самолетов стратегической и тактической авиации, барражирующих постановщиков активных помех, боевых вертолетов в условиях массированного применения указанных средств воздушного нападения, в сложной воздушной и помеховой обстановке, при ведении прикрываемыми войсками маневренных боевых действий и предусматривал применение ракет двух типов: – 9М82 для действий, в основном, по БР "Першинг", авиационным БР типа SRAM, по самолетам на больших дальностях; – 9М83 для поражения аэродинамических целей и БР типа "Ланс" и Р-17 ("Скад"). 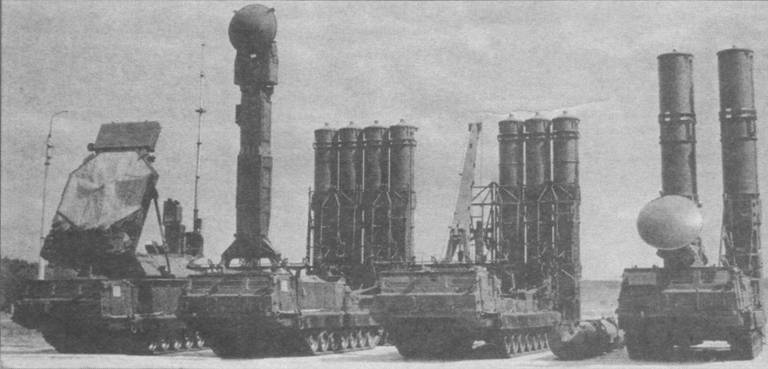 Боевые машины комплекса С-300В В состав боевых средств ЗРС С- 300В (9К81) должны были входить: – командный пункт 9С457, РЛС кругового обзора (КО) "Обзор-3" (9С15М); – РЛС программного обзора (ПО) "Имбирь" (9С19М2) – для обнаружения головных частей БР типа "Першинг", аэробаллистических ракет типа SRAM и барражирующих самолетов-постановщиков помех на дальностях до 100 км; – четыре ЗРК. Каждый ЗРК включал в себя: – многоканальную станцию наведения ракет 9С32; – пусковые установки двух типов (9А83 – с четырьмя ЗУР 9М83 и 9А82 – с двумя ЗУР 9М82); – пускозаряжающие установки (ПЗУ) двух типов (9А85 – для работы с ПУ 9А83 и ЗУР 9М83 и 9А84 – для работы с ПУ 9А82 и ЗУР 9М82), а также средства технического обеспечения и обслуживания. Ракеты 9М82 и 9М83 эксплуатировались, соответственно, в транспортно-пусковых контейнерах (ТПК) 9Я238 и 9Я240. Головным разработчиком ЗРС С- 300В в целом, а также разработчиком КП, многоканальной станции наведения ракет, РЛС программного обзора был определен Научно-исследовательский электромеханический институт (НИЭМИ) МРП. В.П.Ефремов стал главным конструктором системы и указанных средств. Разработка РЛС кругового обзора производилась Научно-исследовательским институтом измерительных приборов (НИИИП) МРП (ранее называвшимся НИИ-208 ГКРЭ) под руководством главного конструктора станции Ю.А.Кузнецова, затем Г. Н. Голубева. Все ПУ и пускозаряжающие установки создавались в Государственном конструкторском бюро компрессорного машиностроения (ГКБ КМ) МАП (ранее именовавшемся СКБ-203 ГКАТ, а ныне – МКБ "Старт"). Главным конструктором установок был определен A.И.Яскин, затем В.С.Евтушенко. Для скорейшего оснащения войск высокоэффективным оружием разработка системы С-300В проводилась в два этапа. На первом этапе система создавалась для борьбы с аэродинамическими целями, крылатыми ракетами и БР типа "Скад" и "Ланс". Опытный образец системы С- 300В, созданный на первом этапе разработки (не включавший в себя РЛС программного обзора, ЗУР 9М82 и соответствующие ей ПУ и пускозаряжающие установки) проходил в 1980-1981 гг. совместные испытания на Эмбенском полигоне ГРАУ МО (начальник полигона B.В.Зубарев) и был принят на вооружение под названием ЗРС С- 300В1 в 1983 году. Путевку в жизнь новой системе дала Госкомиссия под председательством Ю.А. Андерсена. На втором этапе разработки система дорабатывалась с целью обеспечения борьбы с БР типа "Першинг-1A", "Першинг-1Б", аэробаллистическими целями типа SRAM и барражирующими самолетами-постановщиками активных помех на дальностях до 100 км. Совместные испытания системы в полном составе проводились также на Эмбенском полигоне ГРАУ МО в 1985-1986 гг. (начальник полигона В.Р.Унучко) под руководством комиссии, председателем которой вновь был назначен Ю.А.Андерсен. Зенитная ракетная система С-300В в полном комплекте всех ее средств в 1988 году была принята на вооружение войск ПВО СВ. Все боевые средства системы были размещены на обладающих высокой проходимостью и маневренностью, оборудованных аппаратурой навигации, топопривязки и взаимного ориентирования унифицированных гусеничных шасси, разработанных ПО "Кировский завод", применявшихся также для самоходной артиллерийской установки "Пион" и унифицированных по отдельным узлам с танком Т-80. Командный пункт (КП) 9С457 был предназначен для управления боевыми действиями ЗРК (зенитных ракетных дивизионов) системы С- 300В как при автономной работе системы, так и при управлении от вышестоящего КП (от командного пункта зенитной ракетной бригады) в режимах ПРО и противосамолетной обороны. В режиме ПРО КП обеспечивал работу ЗРК по отражению удара обнаруженных с помощью РЛС программного обзора "Имбирь" БР типа "Першинг" и авиационных БР типа SRAM, осуществлял прием радиолокационной информации, управление режимами боевой работы РЛС "Имбирь" и многоканальной станции наведения ракет, распознавание и селекцию истинных целей по тра- екторным признакам, автоматическое распределение целей по ЗРК, а также выдачу секторов работы РЛС "Имбирь" для обнаружения баллистических и аэробаллистических целей, помеховых направлений для определения координат постановщиков помех. В КП были приняты меры по максимальной автоматизации процесса управления. В режиме противосамолетной обороны КП обеспечивал работу до четырех ЗРК (по 6 целевых каналов в каждом) по отражению налета обнаруженных РЛС кругового обзора "Обзор-3" аэродинамических целей (до 200), в том числе в условиях помех, производил завязку и сопровождение трасс целей (до 70), прием информации о целях от многоканальной станции наведения ракет и вышестоящего командного пункта, распознавание классов целей (аэродинамические или баллистические), отбор наиболее опасных целей для поражения ЗРК. КП обеспечивал за цикл целераспределения (три секунды) выдачу до 24 целеуказаний (ЦУ) ЗРК. Среднее работное время КП от получения отметок от целей до выдачи ЦУ при работе с РЛС кругового обзора (при периоде обзора 6 секунд) составляло 17 секунд. При работе по БР типа "Ланс" рубежи выдачи ЦУ составляли 80-90 км. Среднее работное время КП в режиме ПРО не превышало 3 секунд. Вся аппаратура КП, в состав которой входили специальные вычислители (ЭВМ), аппаратура телекодовых и речевых линий связи с сопрягаемыми объектами, пост управления ЗРК с тремя рабочими местами, аппаратура документирования работы КП и боевых средств системы, аппаратура навигации, топопривязки и ориентирования, система автономного энергоснабжения (газотурбинный агрегат питания), аппаратура жизнеобеспечения, размещалась на гусеничном шасси "объект 834". Масса КП – 39 т. Расчет – 7 человек. РЛС кругового обзора 9С15М "Обзор-3" представляла собой трехкоординатную когерентно-импульсную РЛС обнаружения сантиметрового диапазона волн с мгновенной перестройкой частоты, программным электронным управлением лучом (1,5°х 1,5°) в угломестной плоскости, электрогидравлическим вращением антенны по азимуту и высокой пропускной способностью. В РЛС были реализованы два режима кругового регулярного обзора воздушного пространства, используемые при обнаружении аэродинамических целей, а также БР типа "Скад" и "Ланс". В первом режиме зона обзора станции составляла 45° по углу места, инструментальная дальность обнаружения – 330 км, темп обзора – 12 секунд. Истребитель обнаруживался с вероятностью 0,5 на дальности 240 км. Во втором режиме зона обзора станции составляла 20° по углу места, инструментальная дальность – 150 км, темп обзора – 6 секунд. В этом режиме для обнаружения БР была предусмотрена программа замедления вращения антенны по азимуту в секторе ПРО (в пределах 120°) и увеличения сектора обзора по углу места до 55°. При этом темп обновления информации составлял 9 секунд. Во втором режиме самолет-истребитель надежно обнаруживался в пределах всей инструментальной дальности, а дальность обнаружения БР типа "Скад" составляла не менее 115 км, типа "Ланс" – не менее 95 км. Для увеличения потенциала РЛС в отдельных направлениях, защиты ее от активных, пассивных и комбинированных помех были предусмотрены еще четыре программы замедления вращения антенны станции, которые могли быть реализованы в двух режимах регулярного обзора. При использовании этих программ темп обновления информации увеличивался на 6 секунд при размере сектора замедления, равном 30°. Помехозащищенность РЛС обеспечивалась применением антенны, имевшей низкий и быстро спадающий до уровня фона (порядка 50 дБ) уровень боковых лепестков диаграммы направленности, ограничением и оптимальной фильтрацией эхо-сиг- налов, трехканальным автокомпенсатором активных помех, временной автоматической регулировкой усиления приемника, нелинейной схемой селекции движущихся целей с автоматическим учетом скорости ветра (пассивных помех), анализом интенсивности активной помехи и некогерентным накоплением сигналов (в амплитудном режиме и после схемы селекции движущейся цели), автоматическим межобзорным бланкированием отдельных участков зондируемых направлений с интенсивным уровнем помех от местных предметов. Станция была способна определять угловые координаты (пеленги) самолетов-постановщиков шумовой заградительной помехи и выдавать их на КП системы С-300В. На участках интенсивных отражений от местных предметов и метеообразований было возможно бланкирование автоматического съема данных. РЛС кругового обзора обеспечивала выдачу в режиме автосъема данных до 250 отметок за период обзора, среди которых могло быть до 200 целей. 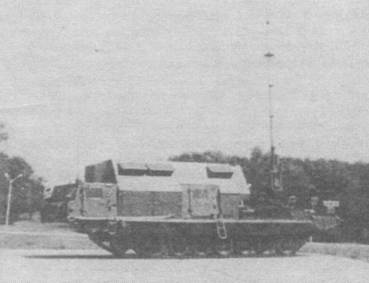 Командный пункт (КП) 9С457 комплекса С-300В 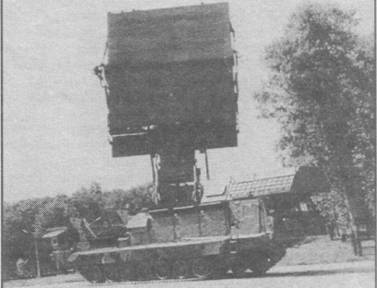 РЛС кругового обзора 9С15М "Обзор-3" комплекса С-300В  РЛС программного обзора 9С19М2 "Имбирь" комплекса С-300В 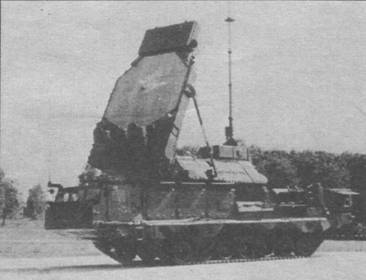 Многоканальная станция наведения ракет 9С32 комплекса С-300В Среднеквадратические ошибки определения координат целей станцией составляли: по дальности – не более 250 м, по углу места – не более 35', по азимуту – не более 30'. Разрешающая способность станции была не хуже 400 м по дальности и 1,5° по угловым координатам. В состав РЛС кругового обзора входили следующие устройства: – антенна, представлявшая собой плоскую одномерную волноводную решетку с программным электрогидравлическим вращением по азимуту и электронным сканированием луча по углу места; – передающее устройство, выполненное на лампе бегущей волны и двух амплитронах, со средней мощностью около 8 кВт: – приемное устройство с усилителем высокой частоты на лампе бегущей волны, обладавшее чувствительностью порядка 1013 Вт; – устройство помехозащиты; – устройство автосъема данных; – вычислительное устройство на базе двух специальных ЭВМ; – аппаратура определения государственной принадлежности системы "Пароль": – аппаратура навигации, топопривязки и ориентирования, система автономного электроснабжения; – газотурбинный агрегат питания, аппаратура жизнеобеспечения, аппаратура телекодовой и речевой связи с КП системы С-300В. Все устройства и различная аппаратура РЛС кругового обзора были смонтированы на гусеничном шасси "объект 832". Масса станции – 46 т. Расчет – 4 чел. РЛС программного обзора 9С19М2 "Имбирь" представляла собой трехкоординатную когерентно-импульсную РЛС сантиметрового диапазона с высоким энергетическим потенциалом, электронным управлением лучом в двух плоскостях и высокой пропускной способностью. Электронное сканирование луча в двух плоскостях позволяло в процессе регулярного обзора быстро обеспечивать анализ секторов целеуказания с КП системы или циклические с высоким темпом (1-2 секунды) обращения к обнаруженным отметкам с целью завязки их в трассы и сопровождение трасс высокоскоростных целей. Использование в станции узкого луча антенны (порядка 0,5°), зондирующих сигналов с линейной частотной модуляцией и с большим коэффициентом сжатия обеспечивало малый импульсный объем, что в сочетании с цифровой системой черес- периодной компенсации, схемой автоматической компенсации скорости ветра (дипольных помех) и электронным сканированием позволяло обеспечивать высокую защищенность РЛС программного обзора от воздействия пассивных помех. Высокий энергетический потенциал, достигнутый за счет использования в передающем устройстве мощного усилительного клистрона, в сочетании с применявшимися электронным сканированием луча антенны и цифровой обработкой принятых сигналов обеспечивал хорошую защищенность от активных шумовых помех. В РЛС программного обзора было реализовано несколько режимов обзора. Один из режимов обеспечивал обнаружение и сопровождение головной части БР типа "Першинг". В этом режиме зона обзора составляла ±45° по азимуту, 26°-75° по углу места и 75-175 км по дальности. При этом угол наклона нормали к поверхности ФАР относительно горизонта составлял 35°. Время обзора указанного сектора поиска с учетом сопровождения двух трасс целей составляло 12,5-14 секунд. Максимальное количество сопровождаемых трасс – 16. Ежесекундно координаты и параметры движения цели передавались на КП системы. Во втором режиме обеспечивалось обнаружение и сопровождение авиационных БР типа SRAM и крылатых ракет с баллистическим и аэробаллистическим стартом. Зона обзора составляла ±30° по азимуту, 9°- 50° по углу места и 20-175 км по дальности. Параметры движения целей с частотой 0,5 Гц передавались на КП 9С457. В третьем режиме осуществлялись обнаружение и сопровождение аэродинамических целей, а также пеленгация (при возможности и дальнометрия) постановщиков помех на расстояниях до 100 км. При этом зона обзора составляла ±30° по азимуту, 0°-50° по углу места и 20- 175 км по дальности при угле наклона нормали ФАР к горизонту, равном 15°. Направление обзора задавалось по телекодовой линии связи с КП системы или оператором станции. При регулярном обзоре зоны поступившее целеуказание с КП системы автоматически прерывало обзор, а после отработки ЦУ обзор возобновлялся. Темп обновления информации зависел от размеров установленной зоны поиска, а также от помеховой обстановки и мог изменяться от 0,3 до 16 секунд. Координаты обнаруженных целей передавались на КП. Среднеквадратичные ошибки измерения координат целей не превышали 70 м по дальности, 15' по азимуту, 12' по углу места. Аппаратура РЛС была размещена на гусеничном самоходе "объект 32". Масса станции – 44 т. Расчет – 4 человека. 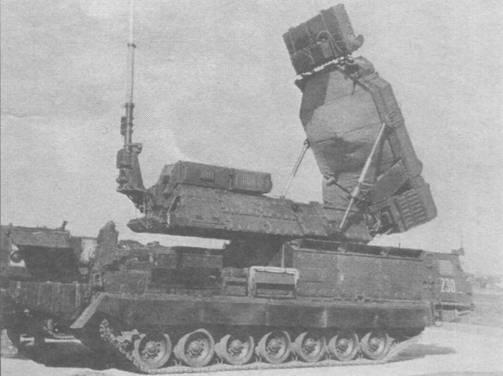 Станция наведения 9С32 комплекса С-300В и ее схема 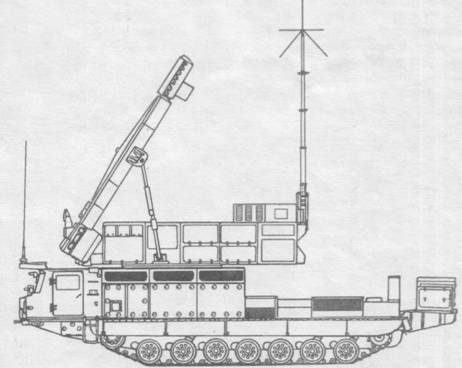 Многоканальная станция наведения ракет 9С32 предназначалась для: – поиска, обнаружения, захвата автосопровождения аэродинамических целей и БР по данным целеуказания с КП системы и автономного (БР – только по данным ЦУ с КП) – выработки и передачи на пустые установки координат и производных координат целей для наведения станций подсвета целей, находящихся на этих установках, а также ЗУР, запускаемых с ПУ и пускозаряжающих установок, на обстреливаемые цели; – управления огневыми средствами (ПУ и пускозаряжающими установками) как централизованно (от КП системы), так и автономно. Многоканальная станция наведения ракет была способна одновременно производить секторный поиск целей (по данным ЦУ или автономно) и сопровождать до 12 целей, одновременно управлять работой всех ПУ и пускозаряжающих установок ЗРК, передавая на них информацию, необходимую для пуска и наведена 12 ЗУР по 6 целям. Станция одновременно регулярно осуществляла просмотр приземной кромки, в которой могли появиться низколетящие цели. Станция представляла собой координатную многоканальную по целям и ЗУР когерентно-импульсную РЛС сантиметрового диапазона с высоким энергетическим потенциалом, электронным сканированием луча в двух плоскостях, обеспечиваемым за счет использования в станции ФАР и системы управления лучом на базе специальной ЭВМ. В станции использовались моноимпульсный метод пеленгации и дальнометрии целей и различные типы зондирующих сигналов, обеспечивавшие определение координат целей и их производных с высокими точностью и разрешающей способностью. В станции использовалась цифровая обработка сигналов во всех режимах работы. В многоканальной станции наведения ракет были предусмотрены два режима боевой работы – по данным ЦУ от КП и автономная работа. В первом режиме станция производила поиск целей в секторе 5° по азимуту и 6° по углу места. Во втором режиме она производила обор сектора ±30° по азимуту (относительно биссектрисы указанного сектора ответственности) и от 0° до 18° по углу места. Азимут (биссектриса) сектора ответственности устанавливалась путем вращения ФАР в пределах ±340°. В станции использовались два типа зондирующих сигналов. Квазинепрерывный сигнал (импульсные пачки с большой дискретностью) – немодулированный и с линейной частотной модуляцией в пачке, применялся при поиске целей по данным ЦУ, а также для обзора сектора автономного поиска и автосопровождения целей. Импульсный сигнал с линейной частотной модуляцией применялся только при поиске в автономном режиме. Обработка принятых сигналов производилась квазиоптимальными фильтрами. Формирование и обработка сигнала с внутриимпульсной линейной частотной модуляцией осуществлялась на дисперсионных линиях задержки с высоким коэффициентом сжатия. Обработка квазинепрерывного сигнала производилась коррелляционно-фильтровым методом с интегрированием на промежуточной частоте принятых сигналов с помощью узкополосных фильтров. Управление системами многоканальной станции наведения ракет в процессе поиска, обнаружения и автосопровождения целей осуществлялось специальной ЭВМ. При автосопровождении сигналы ошибок поступали в следящую координатную систему, которая выдавала в ЭВМ оценки во времени координат и их производных. ЭВМ по этим данным замыкала контур сопровождения, выдавая управляющие коды (сигналы) на синхронизатор, систему управления лучом и другие системы станции. Неоднозначность определения дальности и скорости при поиске квазинепрерывным сигналом устранялась в режиме автосопровождения с помощью производных дальности. 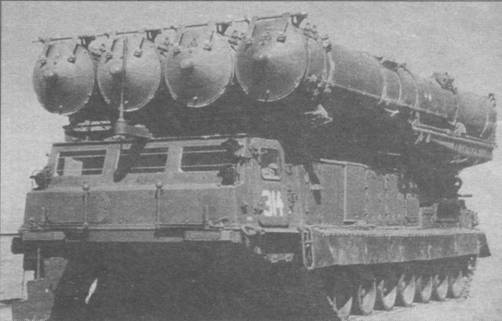 На двух снимках пусковая установка 9А83 комплекса С-300В в походном (вверху), боевом положении (справа) 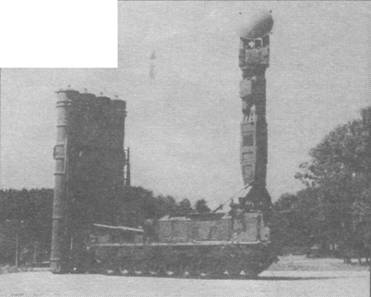 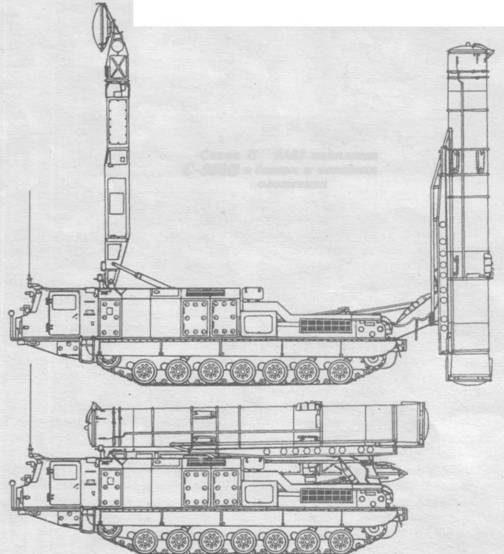 Схема ПУ 9Л83 комплекса С-300В в боевом и походном положениях Многоканальная станция наведения ракет при работе в режиме ЦУ обеспечивала обнаружение истребителей на высотах более 5 км на дальностях 150 км, БР типа "Скад" – 90 км, "Ланс"- 60 км, головной части "Першинг" – 140 км, авиационных БР типа SRAM – 80 км. От момента обнаружения до момента перехода на автосопровождение цели с однозначным определением параметров ее движения проходило от 5 секунд ("Першинг" и SRAM) до 11 секунд (цель – истребитель). При работе в автономном режиме многоканальная станция наведения ракет обеспечивала обнаружение самолетов-истребителей на дальностях до 140 км. Среднеквадратические ошибки определения дальности, скорости и угловых координат целей при их автосопровождении составляли для истребителя 5-25 м по дальности, 0,3- 1,5 м/с – по скорости, 0,2-2 д.у. по азимуту и углу места. Для головной части ракеты "Першинг"- 4-90 м – по дальности, 1,5-35 м/с – по скорости, 0,5-1 д.у. по азимуту и углу места. Разрешающая способность составляла 100 м по дальности, 1° по азимуту и по углу места, 5 м/с по скорости. В состав многоканальной станции наведения ракет входили: – антенная система на основе пассивной ФАР с фазовым управлением лучом шириной около 1°, работавшая "на просвет" при облучении ее рупорным излучателем передатчика и приеме отраженных сигналов тем же коммутируемым рупором; – передающая система на основе цепочки клистронов, развивавшая среднюю мощность 10-13 кВт (импульсную – 150 кВт); – приемная система с усилителями на высокой частоте, обеспечивавшими очень высокую чувствительность – до 10-17 Вт; – система управления лучом; – две специальных ЭВМ; – устройство первичной обработки сигналов; – система индикации; – система управления основной антенной и антеннами квадратурных автокомпенсаторов помех; – следящая координатная система; – система управления и сигнализации; – система телекодовой связи с КП системы и пусковыми установками: – система навигации, топопривязки и ориентирования; – система автономного электроснабжения на базе газотурбинного генератора: – система жизнеобеспечения. Вся указанная аппаратура была смонтирована на гусеничном самоходе "объект 833". Масса станции – 44 т. Расчет – 6 чел. Пусковая установка 9А83 была предназначена для: – транспортирования и хранения четырех полностью боеготовых ЗУР 9М83 в транспортно-пусковых контейнерах (ТПК); – автоматической предстартовой подготовки и пуска ЗУР (с самой ПУ 9А83 или пускозаряжающей установки 9А85); – расчета и выдачи на находящуюся в полете ЗУР 9М83 команд радиокоррекции программного инерциального полета, а также подсвета обстреливаемой цели направленным непрерывным радиоизлучением для обеспечения работы полуактивной доплеровской головки самонаведения ракеты (с использованием размещенной на ПУ станции подсвета цели). ПУ 9А83 была способна обеспечивать одновременно предстартовую подготовку и пуск двух ЗУР с интервалом 1-2 секунд. Время предстартовой подготовки ЗУР – не более 15 секунд. Заряжение ПУ 9А83 осуществлялось с помощью пускозаряжающей установки 9А85. При предварительном кабельном сопряжении время переключения аппаратуры ПУ с собственного боекомплекта ЗУР на боекомплект пускозаряжающие установки не превышало 15 секунд. По передаваемым по телекодовой радиолинии с многоканальной станции наведения ракет командам и ЦУ пусковая установка обеспечивала подготовку ЗУР, отработку ЦУ смонтированной на ней антенной системой станции подсвета цели, выработку и отображение на индикаторе пуска информации о времени до входа цели в зону поражения и времени до ее выхода из зоны, передачу решения этой задачи на многоканальную станцию наведения ракет, пуск двух ЗУР, а также анализ наличия помех ГСН ЗУР и передачу его результатов на многоканальную станции наведения ракет. После старта ЗУР пусковая установка обеспечивала выдачу на многоканальную станцию наведения ракет информации о количестве ЗУР, стартовавших с нее и с сопряженной с нею пускозаряжающей установки, включение антенной и передающей систем станции подсвета цели на излучение в режиме передачи команд радиокоррекции полета ЗУР, а также ее переключение на излучение в режиме подсвета цели. В состав ПУ 9А83 входили: – устройство для установки ТПК в стартовое положение (с гидроприводом) ; – радиоэлектронная аппаратура со специальной ЭВМ; – аппаратура предстартовой подготовки системы самонаведения ЗУР; – аппаратура стартовой автоматики; – аппаратура предстартовой подготовки инерциальной системы управления ЗУР; – станция подсвета цели; – аппаратура навигации, топопривязки и ориентирования; – аппаратура телекодовой связи; – система автономного электроснабжения на базе газотурбинного генератора: – система жизнеобеспечения. Вся указанная аппаратура ПУ размещалась на гусеничном шасси "объект 830". Общая масса ПУ с боекомплектом ЗУР – 47,5 т. Расчет ПУ – 3 чел. Пусковая установка 9А82 была предназначена для транспортирования и хранения полностью боеготовных двух ракет 9М82 в ТПК, а также для исполнения тех же операций, которые выполняет ПУ 9А83. По конструктивному построению, основным характеристикам и функционированию она отличалась от этой ПУ только устройством для установки ТПК в стартовое положение и механической частью станции подсвета целей. Пусковая установка размещалась на гусеничном шасси "объект 831". 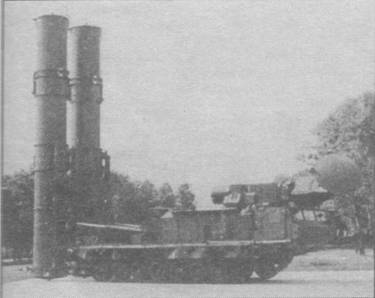 Пусковая установка 9А82 комплекса С-300В в боевом положении и ее схемы в походном и боевом положениях 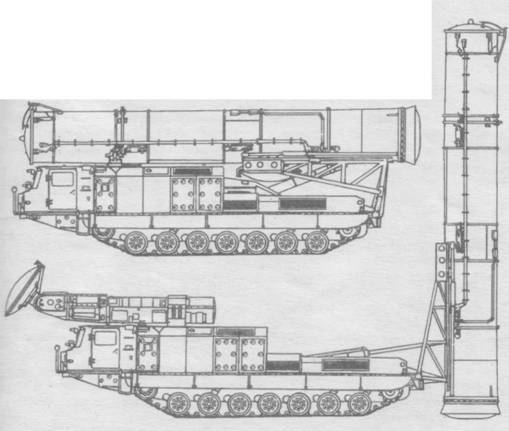  Пуско- заряжающая установка 9А84  Транспортная машина 9Т83 с контейнерами с ЗУР Пуско-заряжающая установка 9А85 была предназначена для перевозки и хранения четырех ракет 9М83 в ТПК, проведения совместно с аппаратурой ПУ 9А83 пуска ЗУР 9М83, заряжения ПУ 9А83 ракетами (с самой себя, с транспортной машины 9Т83 или с народнохозяйственных транспортных средств, с грунта, из пакета МС-160.01), а также для самозаряжания. Время заряжания ПУ 9А83 полным боекомплектом ЗУР составляла – 50-60 мин, грузоподъемность крана – 6350 кг. По составу пускозаряжающая установка отличалась от ПУ наличием крана, установленного вместо различной радиоэлектронной аппаратуры и станции подсвета целей. На ней находились кабели, соединявшие размещенные на ней ракеты с аппаратурой ПУ 9А93. Вместо газотурбинного агрегата электропитания на пускозаряжающей установке применялся дизельный агрегат. Вся аппаратура и боекомплект ЗУР располагались на гусеничном шасси "объект 835". Масса пуско заряжающей установки с боекомплектом ЗУР – 47 т. Расчет – 3 чел. Пуско-заряжающая установка 9А.84 предназначалась для перевозки и хранения двух ракет 9М82 в транспортно-пусковых контейнеpax, проведения совместно с аппаратурой ПУ 9А82 пуска ЗУР 9М82, заряжания этой ПУ и самозаряжения. По своему устройству она отличалась от установки 9А85 только конструкцией устройства для установки ТПК в стартовое положение, а по основным характеристикам и принципам функционирования была аналогична ей. Зенитная управляемая ракета 9М83 была предназначена для поражения самолетов (в том числе маневрирующих с перегрузками до 7-8 ед. и в условиях радиопротиводействия) крылатых ракет в том числе низколетящих типа ALCM, и БР типа "Скад" и "Ланс", а ЗУР 9М82 – также и для поражения головных частей ракет "Першинг-IA", "Першинг-1Б", авиационных БР типа SRAM, самолетов-постановщиков активных помех на дальностях до 100 км. ЗУР 9М82 и 9М83 представляли собой двухступенчатые твердотопливные ракеты, выполненные по аэродинамической схеме "несущий конус" с газодинамическими органами управления первой ступени. Ракеты размещались в ТПК. Конструкция ракет была в максимальной степени унифицирована, основные отличия были связаны с применением более мощной стартовой ступени на 9М82. В головной части ракет были размещены единые для ракет блоки бортовой аппаратуры: аппаратура самонаведения; неконтактное взрывательное устройство (НВУ); инерциальная система управления; бортовое вычислительное устройство. ЗУР были снабжены боевой частью направленного действия. На хвостовом отсеке маршевой ступени размещались четыре аэродинамических руля и четыре стабилизатора. Пуск ЗУР производился при вертикальном положении ТПК с помощью находящегося в нем порохового аккумулятора давления. После выхода ракеты из транспортно-пускового контейнера при вертикальном старте начинался процесс склонения ракеты на заданный угол (задействованием нескольких из восьми импульсных двигателей), который завершался к моменту окончания работы стартовой ступени. При пусках в дальнюю зону по аэродинамическим целям запуск двигателя маршевой ступени производился с задержкой до 20 секунд по отношению к моменту окончания работы двигателя стартовой ступени. Управление ракетой на маршевом и пассивном участках полета осуществлялось посредством отклонения четырех аэродинамических рулей. ЗУР наводилась на цель либо системой инерциального управления по методу пропорциональной навигации с переходом на самонаведение примерно за 10 секунд до подлета к цели, либо системой команд- но-инерциального управления с самонаведением в течение последних 3 секунд полета. Последний способ наведения использовался при стрельбе по целям в условиях мощных ретранслированных (ответных) помех внешнего прикрытия. Полет ЗУР при инерциальном управлении осуществлялся по энергетически оптимальным траекториям, что обеспечивало предельно большую досягаемость ракет. Полетное задание вводилось в бортовое вычислительное устройство ЗУР со специальной ЭВМ ПУ и корректировалось в полете радиокомандами, принимаемыми аппаратурой самонаведения от передатчика ПУ. Оптимальная выборка команд перехода на самонаведение, осуществлявшаяся по информации от аппаратуры самонаведения и инерциальной системы управления ракеты 9М82, делала возможным поражение этой ЗУР таких малоразмерных целей, как головные части БР "Першинг" и авиационной БР SRAM При стрельбе по пеленгуемому многоканальной станцией наведения ракет постановщику активных помех в полетное задание вводился соответствующий признак, по которому производились настройки, обеспечивавшие поражение ракетой 9М82 цели на дальностях до 100 км. За 0,5-2 секунды до точки встречи на борту ЗУР вырабатывалась команда, по которой начинался доворот ракеты по крену для совпадения в момент подрыва боевой части ЗУР максимума плотности поля разлета осколков БЧ с направлением на цель. За 0,3 секунды до точки встречи включалось неконтактное взрывательное устройство ЗУР, которое затем выдавало команду на подрыв БЧ. При большом промахе обеспечивалась самоликвидация ЗУР подрывом БЧ. Аппаратура самонаведения ЗУР имела высокую чувствительность по каналам самонаведения и радиокоррекции, что позволяло обеспечивать надежный захват ГСН ЗУР любой цели на достаточной для сближения поражения дальности. Инерциальная система управления ЗУР обеспечивала высокую точность вывода ракеты в точку захвата цели аппаратурой самонаведения ЗУР. При работе системы С-300В в автономном режиме при налете авиации и ожидаемых ударах БР типа "Скад" и "Ланс". РЛС кругового обзора производила обзор пространства и выдавала радиолокационную информацию об обнаруженных целях на КП системы. Информация о необходимых режимах работы РЛС кругового обзора и распоряжения передавались с КП системы, которой по полученным данным завязывал трассы целей, определял степень их опасности и классы (аэродинамические или баллистические цели типа "Скад" и "Ланс"), производил распределение выбранных на обстрела целей с учетом боеготовности, занятости и боекомплекта ЗУР в подчиненных ЗРК и выдавал ЦУ многоканальной станции наведения ракет. По поступившим данным ЦУ многоканальная станция наведения ракет осуществляла поиск, обнаружение и захват на автосопровождение назначенных для обстрела целей. Захват мог осуществляться автоматически или вручную (операторами станции). После начала автосопровождения координаты целей передавались на КП, где производилось их отождествление с трассами целей командного пункта. В случае необходимости КП мог выдать на многоканальную станцию наведения ракет команды об отмене ЦУ или о запрете стрельбы. ЦУ от КП могло быть с признаком приоритета на обстрел цели, который означал; что эта цель должна была быть поражена в обязательном порядке. КП мог также дать указание многоканальной станции наведения ракет на автономный поиск низколетящих целей в секторе 1,4° по углу места и 60° по азимуту. Координаты автономно обнаруженных низколетящих целей поступали на КП и отождествлялись с трассами КП. После захвата цели многоканальной станцией наведения ракет командир ЗРК назначал ПУ 9А83 для пуска ЗУР 9М83 по соответствующим целям. По этой команде передатчик станции подсвета цели на ПУ включался на эквивалент антенны, о чем на многоканальную станцию наведения ракет поступало донесение. По данным этой станции антенна станции подсвета цели ориентировалась в направлении нормали к плоскости ее ФАР. На ПУ от многоканальной станции наведения ракет начинали поступать координаты цели, их производные, а также выдавались команды о подготовке одной или двух ЗУР 9М83 на ПУ или сопряженной с ней пускозаряжающей установкой 9А85, по завершении которой с ПУ на многоканальную станцию наведения ракет передавалось соответствующее донесение. По поступившим с многоканальной станции наведения ракет координатам и параметрам движения цели на ПУ рассчитывались азимут и угол места цели для наведения на нее антенны станции подсвета цели, координаты упрежденной точки встречи, время, оставшееся до входа цели в зону поражения и до выхода из нее, а также полетное задание для ЗУР. Результаты решения задачи о точках встречи индицировались на табло командира ПУ и передавались на многоканальную станцию наведения ракет. При нахождении упрежденной точки в зоне поражения вырабатывалось разрешение на пуск ЗУР. Командир ЗРК санкционировал пуск, выдавая на ПУ команды о стрельбе (одной ракетой или последовательным залпом из двух ЗУР), а командир ПУ подтверждал прием этой команды соответствующим донесением. По завершении этих операций на ПУ нажималась кнопка "Пуск", после чего на борту ЗУР запоминались полетное задание и плоскость стрельбы. Одна или две ЗУР последовательно стартовали из ТПК, а на многоканальную станцию наведения ракет передавалось соответствующее донесение.  Пуск ЗУР 9М83  Компоновка ракеты 9М83 комплекса С-300В (по разрезному макету на"Мосаэрошоу-92') Основные характеристики ЗРС С-300В 1. Зона поражения аэродинамических целей, км – по дальности до 100 – по высоте 0,025..30 2. Зона поражения баллистических целей по высоте, км 1..25 3. Максимальная скорость поражаемых целей, м/с 3000 4. Число целей, одновременно обстреливаемых дивизионом 24 5. Число ЗУР, одновременно наводимых дивизионом 24 6. Темп стрельбы, с 1,5 7. Время подготовки ЗУР к пуску, с 15 8. Время перевода системы из дежурного режима в боевой, с 40 9. Боекомплект ЗУР дивизиона (на ПУ и пускозаряжающих установках) 96-192 10. Вероятность поражения ракеты "Ланс" одной ЗУР 9М83 0,5..0,65 11. Вероятность поражения самолета одной ЗУР 9М83 0,7..0,9 12. Вероятность поражения головной части ракеты "Першинг" одной ЗУР 9М82 0,4..0,6 13. Вероятность поражения ракеты СРЭМ одной ЗУР 9М82 0,5..0,7 Основные характеристики ЗУР системы С-300В
* в скобках представлены характеристики ЗУР в ТПК По выработанной команде о старте ЗУР передатчик станции подсвета цели переводился в режим излучения в пространство через рупорную антенну широким лучом. В этом режиме при маневрах цели радиокомандами с ПУ, выработанными по информации от многоканальной станции наведения ракет, производилась корректировка полетного задания ЗУР. При подлете ЗУР к цели передатчик подсвета переключался на параболическую антенну (узкий луч) и облучал цель непрерывной электромагнитной энергией для автоматического захвата и сопровождения ее по скорости сближения (частоте Доплера) аппаратурой самонаведения ракеты. По переданным на борт ЗУР по каналу радиокоррекции координатам цели и по рассчитанным на борту ЗУР по данным инерциальной системы управления собственным ее координатам определялся момент доворота ЗУР по крену. Угол этого доворота, обеспечивающий накрытие цели направленным потоком осколков боевой части ЗУР рассчитывался по информации от аппаратуры самонаведения. Информация от аппаратуры самонаведения использовалась также для окончательного взведения неконтактного взрывательного устройства – полуактивного радиовзрывателя. После этого управление ЗУР прекращалось, а радиовзрыватель определял момент подрыва БЧ ракеты. После встречи ЗУР с целью от многоканальной станции наведения ракет на ПУ передавалась команда об ее сбросе. Передатчик подсвета Г1У переключался на эквивалент антенны. На КП системы с многоканальной станции наведения ракет докладывалось об освобождении ПУ и оставшемся боекомплекте ЗУР. КП производил дальнейшее целераспределение и с учетом этой информации выдавал ЦУ на ЗРК. При работе системы в автономном режиме в ожидании ударов БР типа "Першинг" РЛС программного обзора вела регулярный поиск в секторе 90° по азимуту и от 26° до 75° по углу места. Центр сектора поиска по команде с КП системы устанавливался в ракетоопасном направлении. При появлении отметок в каком-либо угловом направлении в его окрестностях организовывался дополнительный осмотр (повторные обращения луча). Если полученные отметки удовлетворяли критерию завязки трасс, то начиналось сопровождение трассы цели и выдача ее траекторных параметров на КП системы. КП отождествлял информацию от цели с имеющейся информацией от других источников, отображал ее на индикаторах поста разведки и обнаружения, и производил внеочередное автоматическое целераспределение. При выборе незанятого ЗРК, которому выдавалось ЦУ для обстрела цели, принимались во внимание расчетная точка падения головной части БР относительно ЗРК, режим его работы (по аэродинамическим целям или БР), наличие в ЗРК боеготовых стрельбовых каналов с ЗУР 9М82. Информация о точках стояния ЗРК и их состоянии поступала от всех многоканальных станций наведения ракет на КП системы. На многоканальной станции наведения ракет, принявшей ЦУ по БР, автоматически производились включение поиска цели в секторе ЦУ и назначение двух ПУ 9А82 для обстрела данной цели (с подготовкой на каждой ПУ или пускозаряжающей установки 9А84 двух ЗУР 9М82 и трансляцией на ПУ координат и ЦУ). При обнаружении цели многоканальная станция наведения ракет переходила на ее автосопровождение и отождествляла ее координаты с ЦУ, выдавая донесение на КП в случае их совпадения. Отождествление по данным многоканальной станции наведения ракет производилось и на КП. При поступлении с многоканальной станции наведения ракет на ПУ команды на стрельбу одной или двумя ЗУР и завершении предпусковой подготовки ракет командир ПУ мог произвести пуски ЗУР. Так как головная часть БР могла быть в наряде с ложной целью, то на КП производилась селекция головной части, и стрельба организовывалась по цели с соответствующим признаком: При наличии угрозы применения воздушным противником (самолетами) малоразмерных авиационных БР или ракет типа SRAM РЛС программного обзора вела регулярный обзор пространства (в секторе 60° по азимуту и от 9° до 50° по углу места) в направлении ожидаемого налета. Обнаружение и завязка трасс этих целей производились так же, как по БР типа "Першинг", однако, на КП системы со станции выдавались трассы и отметки только тех целей, скорость которых превышала 300 м/с. На КП производилось распознавание ракет и выбирались ЗРК, для которых стрельба по ним была наиболее эффективной. При этом к стрельбе по авиационным БР могли привлекаться ЗРК, находившиеся в режиме работы по , -аэродинамическим целям, но имевшие боеготовые ЗУР 9М82. При работе системы по барражирующим на дальностях до 100 км самолетам-постановщикам активных помех КП системы выдавал на многоканальную станцию наведения ракет ЦУ по трассе, сформированной по информации от РЛС программного обзора или от РЛС кругового обзора, или по объединенной информации. Возможно было также ЦУ от КП системы по информации от вышестоящего командного пункта зенитной ракетной бригады С-300В Многоканальная станция на-ведения ракет брала самолет-постановщик помех на автосопровождение по угловым координатам и докладывала об этом на КП системы, Который организовывал выдачу на станцию дальности до постановищика помех, используя для этого данные о дальности до сопровождаемой КП цели, наиболее близкой по пеленгу самолета-постановщика. На многоканальной станции наведения ракет путем экстраполяции данных КП определялась дальность до сопровождаемого постановщика. Дальнейшая работа системы производилась так же, как по аэродинамическим целям. На ПУ 9А82 выдавались все команды, необходимые для организации стрельбы ракетой 9М82, а также команда с признаком помехи для многоканальной станции наведения ракет, которая транслировалась в полетном задании ЗУР и изменяла решение предпусковых задач наведения, которое осуществлялось относительно текущей, а не упрежденной точки положения цели, на борту ЗУР эта команда изменяла алгоритм работы бортового вычеслительного устройства, что обеспечивало самонаведение ракеты на цель при больших расстояниях между ними. В остальном работа системы управления ЗУР была аналогична работе по обычной аэродинамической цели. В режиме централизованного управления ЗРС С-300В работала по командам, целераспределению и целеуказанию от КП (АСУ "Поляна- Д4") зенитной ракетной бригады, в которую организационно сводились зенитные ракетные дивизионы (ЗРК), вооруженные системой С- 300В. В бригаде предполагалось иметь автоматизированный КП (пункт боевого управления) из состава указанной АСУ с радиолокационным постом (включавшим в себя РЛС кругового обзора 9С15М, РЛС программного обзора 9С19М2, РЛС дежурного режима 1Л13 и пункт обработки радиолокационной информации ПОРИ-П1), три- четыре зенитных ракетных дивизиона. Каждый зенитный ракетный дивизион состоял из КП 9С457, РЛС 9С15М, РЛС 9С19М2 и четырех зенитных ракетных батарей, в каждую из которых входили одна многоканальная станция наведения ракет 9С32, две ПУ 9А82, одна пускозаряжающая установка 9А84, четыре ПУ 9А83 и две пускозаряжающие установки 9А85. Фронтовые зенитные ракетные бригады С-300В должны были заменить армейско-фронтовые зенитные ракетные бригады "Круг". Высокие боевые возможности и мобильность зенитных ракетных систем С-300В неоднократно были подтверждены учебно-боевыми стрельбами и на специальных учениях. Так, на учениях"Оборона-92" система обеспечивала поражение самолетов первой же ракетой, а БР уничтожались ею с расходом не более двух ЗУР. Создание ЗРС С-300В явилось значительным отечественным научно-техническим достижением, опережающим зарубежные замыслы. Во многом благодаря высоким организаторским способностям, волевым качествам, военной и технической эрудиции председателя государственных комиссий по совместным испытаниям систем С-300В1 и С-300В Ю.А.Андерсена удалось успешно провести испытания систем, объективно оценить их возможности и рекомендовать системы к принятию на вооружение Советской Армии (войск ПВО СВ). Трудно переоценить вклад в разработку системы С-300В многих коллективов оборонных отраслей промышленности и военных специалистов. Труд их был достойно отмечен государством. Лауреатами Ленинской премии стали В.Н.Шебеко, В.А.Смирнов, Д.И.Прокофьев, В.Н.Епифанов, Г.И.Чекин. Государственной премии СССР были удостоены В.П.Ефремов, В.А.Винокуров, Э.К.Спринтис, Ю.Я.Зотов, Л.П.Гельд, Ю.А.Кузнецов, В.И.Згода, Э.И.Соренков, Е.П. Ефремов, И.Ф.Голубев, А.Г.Головин, С.М.Коваль, Н.Ф.Иова, Ю.А.Кожухов, И.А.Бисярин, A.И.Извеков, С.А.Барсукова, B.П.Нечаев, И.Д.Волков, М.Б.Дуэль, Ю.А.Андерсен и другие. Производство КП, многоканальной станции наведения ракет и РЛС программного обзора системы С- 300В было освоено в Научно-производственном объединении (НПО) "Марийский машиностроительный завод" МРП. Ракеты, ПУ и пускозаряжающие установки изготовляло ПО "Свердловский машиностроительный завод им. М.И. Калинина" МАП. РЛС кругового обзора производилась на Муромском заводе радиоизмерительных приборов МРП. Гусеничные самоходы для боевых средств системы поставляло ПО "Кировский завод". Коллективы этих предприятий также вложили в освоение производства этой сложной системы большой творческий труд, позволивший сделать ее технологичной, а серийные образцы ЗРС С-300В конкурентоспособными на мировом рынке оружия. Работы по совершенствованию ЗРС С-300В продолжались. В конце семидесятых годов началось размещение в Европе американских баллистических ракет "Першинг-2", максимальная дальность которых оценивалась в 2500 км. В связи с этим потребовалось существенное расширение боевых возможностей отечественных зенитных ракетных средств. В соответствии с публикацией журнала "Военный парад" №2 за 1998 год (стр.34-36) разработанная в последние годы зенитная ракетная система "Антей-2500" обеспечивает возможность перехвата баллистических ракет с дальностью до 2500 км, а максимальная дальность поражения аэродинамических целей увеличена до 200 км. В состав системы "Антей-2500" входят командный пункт 9С457М, РЛС кругового обзора 9С15М2,РЛС программного обзора 9С19М, многоканальные станцию наведения ракет 9С32М, пусковые установки 9А83М, ЗУР 9М83М и 9М82М. Система может одновременно обстреливать 24 аэродинамических цели или 16 баллистических ракет с ЭПР 0,02 м² , летящих со скороЛями до 4500 м/с. 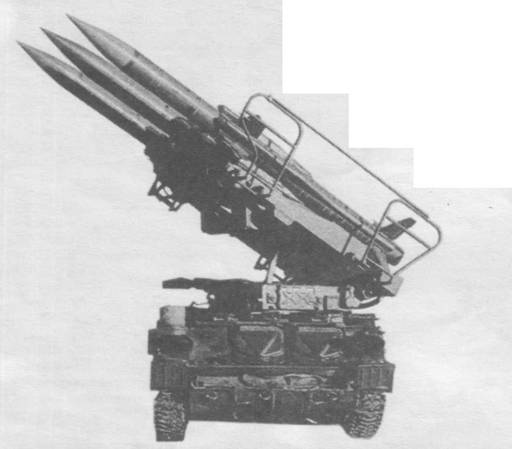 |
|
||||||||||||||||||||||||||||||||||||||||||||||
|
Главная | Контакты | Прислать материал | Добавить в избранное | Сообщить об ошибке |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||