|
||||
|
Глава 15 Роботизованная рука-манипулятор, интерфейс IBM PC и система голосового управления Данный проект представляет собой многоуровневую модульную задачу. Первый этап проекта – сборка модуля роботизованной руки-манипулятора, поставляемой в виде набора деталей. Вторым этапом задачи будет сборка интерфейса IBM PC также из набора деталей. Наконец, третий этап задачи представляет собой создание модуля голосового управления. Манипулятором робота можно управлять вручную с помощью ручного пульта управления, входящего в комплект набора. Рукой робота можно также управлять либо через собранный из набора интерфейс IBM PC, либо используя модуль голосового управления. Набор интерфейса IBM PC позволяет управлять и программировать действия робота через рабочий компьютер IBM PC. Устройство голосового управления позволит вам управлять рукой робота с помощью голосовых команд. Все эти модули вместе образуют функциональное устройство, которое позволит вам проводить эксперименты и программировать автоматизированные последовательности действий или даже «оживлять» управляемую полностью «по проводам» руку-манипулятор. Интерфейс PC позволит вам с помощью персонального компьютера запрограммировать руку-манипулятор на цепь автоматизированных действий или «оживить» ее. Существует также опция, в которой вы можете управлять рукой в интерактивном режиме, используя либо ручной контроллер, либо программу под Windows 95/98. «Оживление» руки представляет собой «развлекательную» часть цепочки запрограммированных автоматизированных действий. Например, если вы наденете на руку-манипцулятор детскую перчаточную куклу и запрограммируете устройство на показ небольшого шоу, то вы запрограммируете «оживление» электронной куклы. Программирование автоматизированных действий находит широкое применение в промышленности и индустрии развлечений. Наиболее широко применяемым в промышленности роботом является робот рука-манипулятор. Рука робота представляет собой исключительно гибкий инструмент хотя бы потому, что конечный сегмент манипулятор руки может быть соответствующим инструментом, требуемым для конкретной задачи или производства. Например, шарнирный сварочный манипулятор может быть использован для точечной сварки, с помощью сопла-распылителя можно окрашивать различные детали и узлы, а захват может использоваться для зажима и установки предметов – это лишь некоторые примеры. Итак, как мы видим, рука-манипулятор робота выполняет много полезных функций и может служить идеальным инструментом для изучения различных процессов. Однако создание роботизованной руки-манипулятора с «нуля» представляет собой сложную задачу. Гораздо проще собрать руку из деталей готового набора. Компания OWI продает достаточно хорошие наборы руки-манипулятора, которые можно приобрести у многих дистрибьюторов электронных устройств (см. список деталей в конце этой главы). С помощью интерфейса можно подключить собранную руку-манипулятор к порту принтера рабочего компьютера. В качестве рабочего компьютера можно использовать машину серии IBM PC или совместимую, которая поддерживает DOS или Windows 95/98. После подключения к порту принтера компьютера рукой-манипулятором можно управлять в интерактивном режиме либо программным образом с компьютера. Управление рукой в интерактивном режиме очень просто. Для этого достаточно щелкнуть по одной из функциональных клавиш, чтобы передать роботу команду выполнения того или иного движения. Второе нажатие на клавишу прекращает выполнение команды. Программирование цепочки автоматизированных действий также не составляет особого труда. Сперва щелкните по клавише Program, чтобы перейти в программную моду. В этой моде рука функционирует точно так же, как это было описано выше, но при этом в дополнение каждая функция и время ее действия фиксируются в script-файле. Script-файл может содержать до 99 различных функций, включая паузы. Сам script-файл может быть повторно воспроизведен 99 раз. Запись различных script-файлов позволяет производить эксперименты с управляемой компьютером последовательностью автоматизированных действий и «оживлению» руки. Работа с программой под Windows 95/98 более детально описана ниже. Программа под Windows включена в набор интерфейса роботизованной руки-манипулятора или может быть бесплатно загружена из Интернета http://www.imagesco.com. В дополнение к программе Windows рукой можно управлять, используя BASIC или QBASIC. Программа уровня DOS содержится на дискетах, включенных в комплект набора интерфейса. Однако DOS программа позволяет осуществлять управление только в интерактивном режиме с использованием клавиатуры (см. распечатку BASIC программы на одной из дискет). Программа уровня DOS не позволяет создавать script-файлы. Однако если есть опыт программирования на BASIC, то последовательность движений руки-манипулятора может быть запрограммирована аналогично работе script-файла, используемого в программе под Windows. Последовательность движений может повторяться, как это сделано во многих «одушевленных» роботах. Роботизованная рука-манипулятор Рука-манипулятор (см. рис. 15.1) имеет три степени свободы движения. Локтевое сочленение может перемещаться вертикально вверх-вниз по дуге примерно 135°. Плечевой «сустав» перемещает захват вперед и назад по дуге примерно 120°. Рука может поворачиваться на основании по часовой стрелке или против часовой стрелки на угол примерно 350°. Захват руки робота может брать и удерживать объекты до 5 см в диаметре и поворачиваться вокруг в кистевом сочленении примерно на 340°. 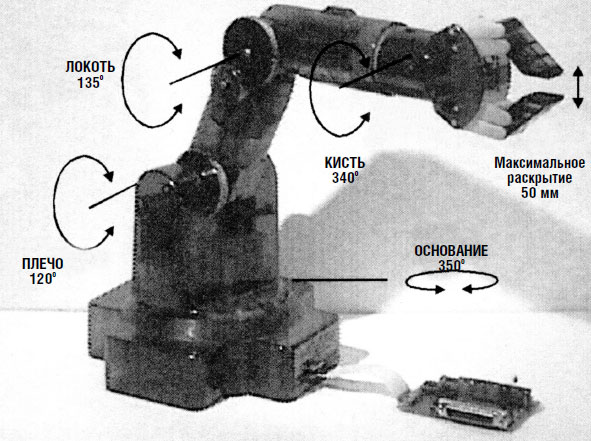 Рис. 15.1. Кинематическая схема движений и поворотов руки-робота Для приведения руки в движение компания OWI Robotic Arm Trainer использовала пять миниатюрных двигателей постоянного тока. Двигатели обеспечивают управление рукой при помощи проводов. Такое «проводное» управление означает, что каждая функция движения робота (т. е. работа соответствующего двигателя) управляется отдельными проводами (подачей напряжения). Каждый из пяти двигателей постоянного тока управляет своим движением руки-манипулятора. Управление по проводам позволяет сделать блок контроллера руки, непосредственно реагирующий на электрические сигналы. Это упрощает схему интерфейса руки робота, который подключается к порту принтера. Рука изготовлена из легкого пластика. Большинство деталей, несущих основную нагрузку, также выполнены из пластика. Двигатели постоянного тока, использованные в конструкции руки, представляют собой миниатюрные высокооборотные двигатели с низким крутящим моментом. Для увеличения крутящего момента каждый мотор соединен с редуктором. Двигатели вместе с редукторами установлены внутри конструкции руки-манипулятора. Хотя редуктор увеличивает крутящий момент, рука робота не может поднять или нести достаточно тяжелые предметы. Рекомендуемый максимально допустимый вес при поднятии составляет 130 г. Набор для изготовления руки робота и его компоненты представлены на рисунках 15.2 и 15.3. 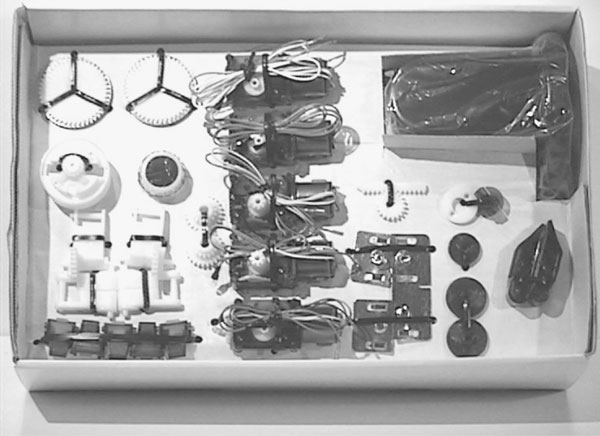 Рис. 15.2. Набор для изготовления руки-робота 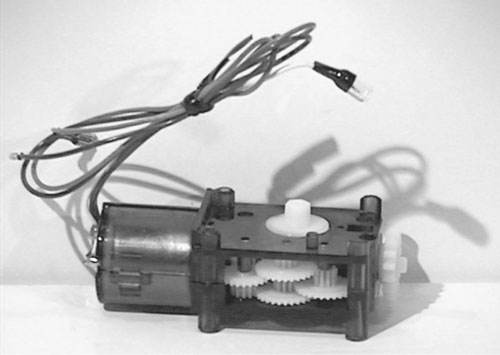 Рис. 15.3. Редуктор перед сборкой Принцип управления двигателями Для того чтобы понять принцип работы управления по проводам, посмотрим, как цифровой сигнал управляет работой отдельного двигателя постоянного тока. Для управления двигателем требуются два комплементарных транзистора. Один транзистор имеет проводимость PNP типа, другой – соответственно проводимость NPN типа. Каждый транзистор работает как электронный ключ, управляя движением тока, протекающего через двигатель постоянного тока. Направления движения тока, управляемые каждым из транзисторов, противоположны. Направление тока определяет направление вращения двигателя соответственно по часовой стрелке или против часовой стрелки. На рис. 15.4 приведена тестовая схема, которую вы можете собрать перед изготовлением интерфейса. Обратите внимание, что когда оба транзистора заперты, то двигатель выключен. В каждый момент времени должен быть включен только один транзистор. Если в какой-то момент оба транзистора случайно окажутся открытыми, то это приведет к короткому замыканию. Каждый двигатель управляется двумя транзисторами интерфейса, работающими аналогичным образом. 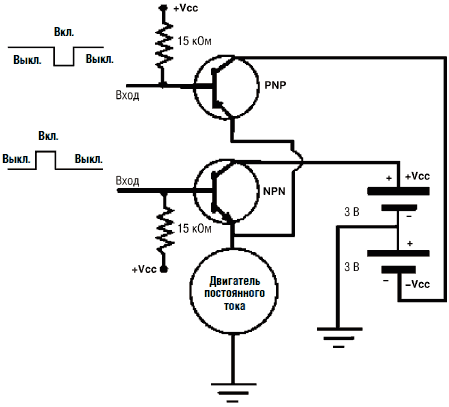 Рис. 15.4. Схема устройства проверки Конструкция интерфейса для PC Схема PC интерфейса приведена на рис. 15.5. В набор деталей PC интерфейса входит печатная плата, расположение деталей на которой показано на рис. 15.6. 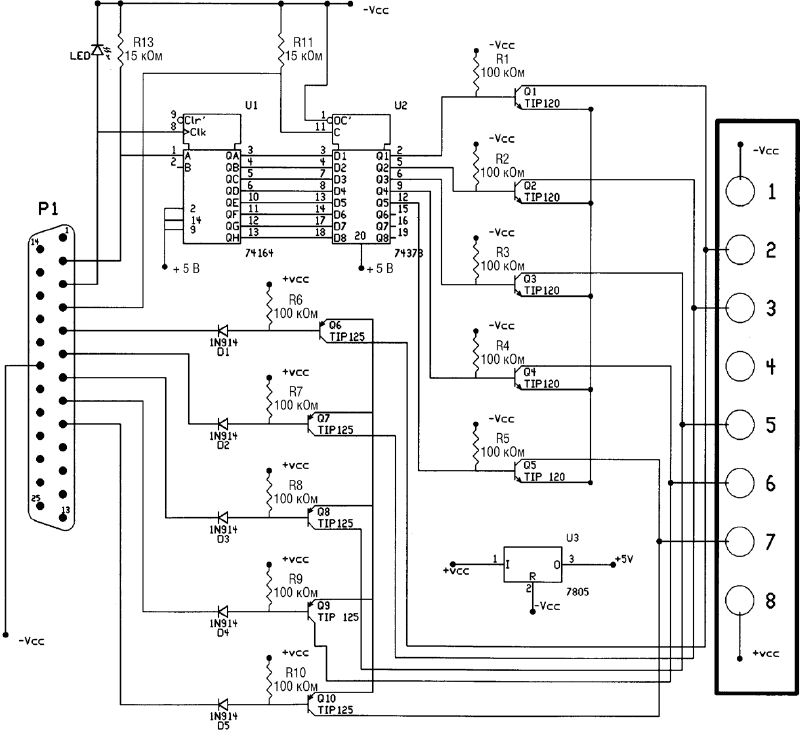 Рис. 15.5. Принципиальная схема интерфейса РС 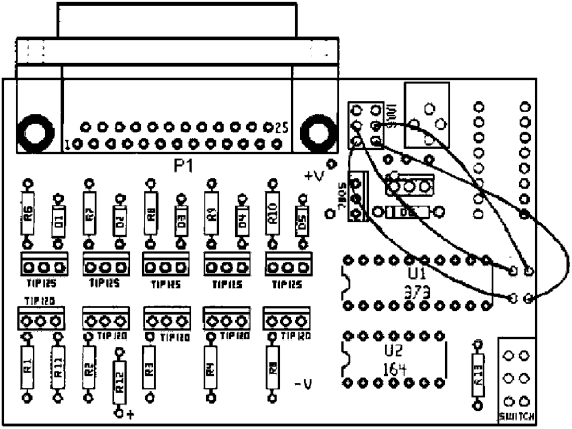 Рис. 15.6. Схема расположения деталей РС интерфейса Прежде всего нужно определить сторону монтажа печатной платы. На стороне монтажа прочерчены белые линии, обозначающие резисторы, транзисторы, диоды, ИС и разъем DB25. Все детали вставляются в плату с монтажной стороны. Общее указание: после пайки детали к проводникам печатной платы необходимо удалить излишне длинные выводы со стороны печати. Очень удобно следовать определенной последовательности при монтаже деталей. Сперва смонтируйте резисторы 100 кОм (цветная маркировка колец: коричневое, черное, желтое, золотое или серебряное), которые обозначены R1-R10. Затем смонтируйте 5 диодов D1-D5, убедившись, что черная полоска на диодах находится напротив разъема DB25, как это показано белыми линиями, нанесенными на монтажную сторону печатной платы. Затем смонтируйте резисторы 15 кОм (цветная маркировка, коричневый, зеленый, оранжевый, золотой или серебряный), обозначенные R11 и R13. В позиции R12 припаяйте к плате красный светодиод. Анод светодиода соответствует отверстию под R12, обозначенному знаком +. Затем смонтируйте 14– и 20-контактные панельки под ИС U1 и U2. Смонтируйте и впаяйте разъем DB25 уголкового типа. Не пытайтесь вставлять ножки разъема в плату с излишним усилием, здесь требуется исключительно точность. При необходимости осторожно покачайте разъем, стараясь не погнуть ножки выводов. Закрепите движковый переключатель и регулятор напряжения типа 7805. Отрежьте четыре куска провода необходимой длины и припаяйте к верхней части переключателя. Придерживайтесь расположения проводов, как показано на рисунке. Вставьте и впаяйте транзисторы TIP 120 и TIP 125. Наконец, впаяйте восьмиконтактный цокольный разъем и соединительный 75 миллиметровый кабель. Цоколь монтируется так, что наиболее длинные выводы смотрят вверх. Вставьте две ИС – 74LS373 и 74LS164 – в соответствующие панельки. Убедитесь, что положение ключа ИС на ее крышке совпадает с ключом, помеченным белыми линиями на печатной плате. Вы могли заметить, что на плате остались места под дополнительные детали. Это место предназначено для сетевого адаптера. На рис. 15.7 показана фотография готового интерфейса со стороны монтажа. 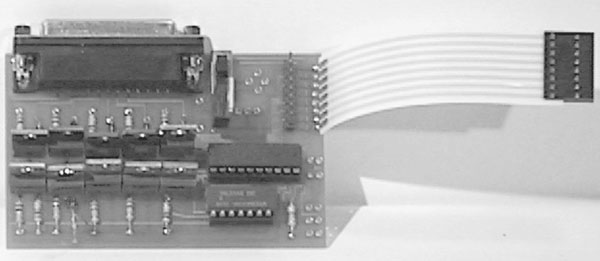 Рис. 15.7. РС интерфейс в сборе. Вид сверху Принцип работы интерфейса Рука-манипулятор имеет пять двигателей постоянного тока. Соответственно нам потребуются 10 шин входа/выхода для управления каждым двигателем, включая направление вращения. Параллельный (принтерный) порт IBM PC и совместимых машин содержит только восемь шин ввода/вывода. Для увеличения числа шин управления в интерфейсе руки робота используется ИС 74LS164, которая является преобразователем последовательного кода в параллельный (SIPO). При использовании всего двух шин параллельного порта D0 и D1, по которым посылается последовательный код в ИС, мы можем получить восемь дополнительных шин ввода/вывода. Как уже говорилось, можно создать восемь шин ввода/вывода, но в данном интерфейсе используются пять из них. Когда последовательный код поступает на вход ИС 74LS164, на выходе ИС появляется соответствующий параллельный код. Если бы выходы ИС 74LS164 были непосредственно подключены к входам управляющих транзисторов, то отдельные функции руки-манипулятора включались и выключались бы в такт посылке последовательного кода. Очевидно, что такая ситуация является недопустимой. Чтобы избежать этого, в схему интерфейса введена вторая ИС 74LS373 – управляемый восьмиканальный электронный ключ. ИС 74LS373 восьмиканальный ключ имеет восемь входных и восемь выходных шин. Двоичная информация, присутствующая на входных шинах передается на соответствующие выходы ИС только в том случае, если на ИС подан разрешающий сигнал. После выключения разрешающего сигнала текущее состояние выходных шин сохраняется (запоминается). В этом состоянии сигналы на входе ИС не оказывают никакого действия на состояние выходных шин. После передачи последовательного пакета информации в ИС 74LS164 с вывода D2 параллельного порта подается разрешающий сигнал на ИС 74LS373. Это позволяет передать информацию уже в параллельном коде с входа ИС 74LS174 на ее выходные шины. Состоянием выходных шин управляются соответственно транзисторы TIP 120, которые, в свою очередь, управляют функциями руки-манипулятора. Процесс повторяется при подаче каждой новой команды на руку-манипулятор. Шины параллельного порта D3-D7 управляют непосредственно транзисторами TIP 125. Подключение интерфейса к руке-манипулятору Питание роботизованной руки-манипулятора осуществляется от источника питания 6 В, состоящего из четырех D-элементов, расположенных в основании конструкции. Интерфейс PC питается также от этого источника 6 В. Источник питания является биполярным и выдает напряжения ±3 В. Питание на интерфейс подается через восьмиконтактный разъем Molex, присоединенный к основанию манипулятора. Присоедините интерфейс к руке-манипулятору при помощи восьмижильного кабеля Molex длиной 75 мм. Кабель Molex присоединяется к разъему, расположенному в основании манипулятора (см. рис. 15.8). Проверьте правильность и надежность вставки разъема. Для соединения платы интерфейса с компьютером используется кабель типа DB25 длиной 180 см, имеющийся в наборе. Один конец кабеля присоединяется к порту принтера. Другой конец соединяется с разъемом DB25 на плате интерфейса. 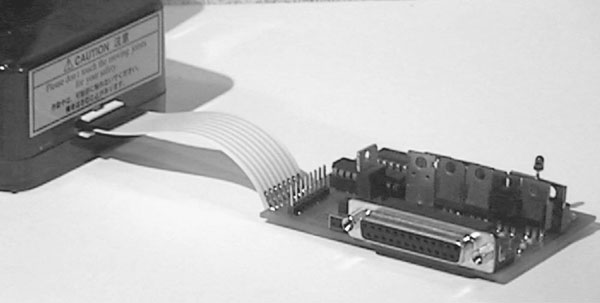 Рис. 15.8. Соединение РС интерфейса с рукой-роботом В большинстве случаев к порту принтера штатно подключен принтер. Чтобы не заниматься присоединением и отключением разъемов каждый раз, когда вы хотите использовать манипулятор, полезно приобрести двухпозиционный блок переключателя шин принтеров A/B (DB25). Присоедините разъем интерфейса манипулятора к входу А, а принтер – к входу В. Теперь вы можете использовать переключатель для соединения компьютера либо с принтером, либо с интерфейсом. Установка программы под Windows 95 Вставьте дискету 3,5" с меткой «Disc 1» в дисковод для флоппи-дисков и запустите программу установки (setup.exe). Программа установки создаст директорию с именем «Images» на жестком диске и скопирует необходимые файлы в эту директорию. В Start меню появится иконка Images. Для запуска программы щелкните по иконке Images в стартовом меню. Работа с программой под Windows 95 Соедините интерфейс с портом принтера компьютера при помощи кабеля DB 25 длиной 180 см. Соедините интерфейс с основанием руки-манипулятора. До определенного времени держите интерфейс в выключенном состоянии. Если в это время включить интерфейс, то сохранившаяся в порту принтера информация может вызвать движения руки-манипулятора. Щелкнув два раза по иконке Images в стартовом меню, запустите программу. Окно программы показано на рис. 15.9. При работе программы красный светодиод на плате интерфейса должен мигать. Примечание: чтобы светодиод начал мигать, включение питания интерфейса не требуется. Скорость мигания светодиода определяется скоростью работы процессора вашего компьютера. Мерцание светодиода может оказаться очень тусклым; для того чтобы это заметить, вам, возможно, придется уменьшить освещенность в комнате и сложить ладони «колечком» для наблюдения за светодиодом. Если светодиод не мигает, то, возможно, программа обращается по ошибочному адресу порта (порт LPT). Для переключения интерфейса на другой адрес порта (LPT порт), зайдите в окно меню установки адреса порта принтера (Printer Port Options box), расположенного в правом верхнем углу экрана. Выберите другую опцию. Правильная установка адреса порта вызовет мигание светодиода. 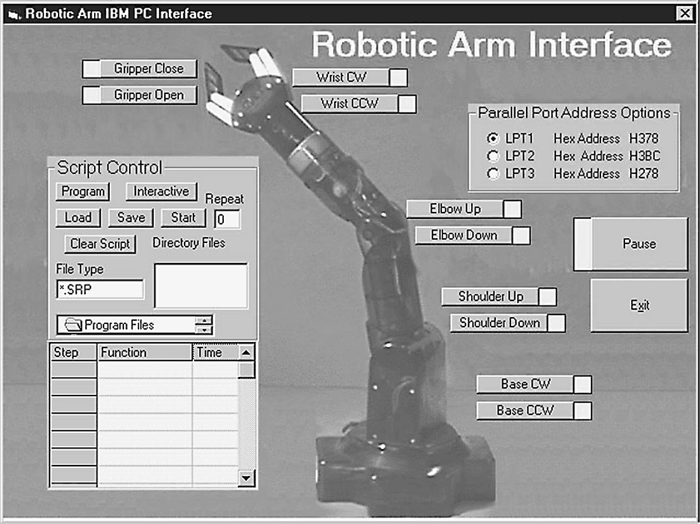 Рис. 15.9. Скриншот программы РС интерфейса под Windows Когда светодиод будет мигать, щелкните по иконке Puuse и только после этого включите интерфейс. Щелчок соответствующей функциональной клавиши вызовет ответное движение руки-манипулятора. Повторный Щелчок приведет к остановке движения. Использование функциональных клавиш для управления рукой называется интерактивной модой управления. Создание script-файла Для программирования движений и автоматизированных последовательностей действий руки-манипулятора используются script-файлы. Script-файл содержит список временных команд, управляющих движениями руки-манипулятора. Создать script-файл очень просто. Для создания файла кликните по функциональной клавише program. Эта операция позволит войти в моду «программирования» script-файла. Нажимая на функциональные клавиши, мы будем управлять движениями руки, как мы уже делали, но при этом информация команд будет записываться в желтую script-таблицу, расположенную в нижнем левом углу экрана. Номер шага, начиная с единицы, будет указан в левой колонке, а для каждой новой команды он будет увеличиваться на единицу. Тип движения (функции) указан в средней колонке. После повторного щелчка функциональной клавиши выполнение движения прекращается, а в третьей колонке появляется значение времени выполнения движения от его начала до окончания. Время выполнения движения указывается с точностью до четверти секунды. Продолжая таким же образом, пользователь может запрограммировать в script-файл до 99 движений, включая паузы во времени. Затем script-файл можно сохранить, а в дальнейшем загрузить из любой директории. Выполнение команд script-файла можно циклически повторить до 99 раз, для чего необходимо ввести количество повторов в окно Repeat и нажать Start. Для окончания записи в script-файл нажмите клавишу Interactive. Эта команда переведет компьютер обратно в интерактивный режим. «Оживление» предметов Script-файлы могут быть использованы для компьютерной автоматизации действий или для «оживления» предметов. В случае «оживления» предметов управляемый роботизованный механический «скелет» обычно покрыт внешней оболочкой и сам не виден. Помните куклу-перчатку, описанную в начале главы? Внешняя оболочка может иметь вид человека (частично или полностью), пришельца, животного, растения, камня и чего-либо еще. Ограничения области применения Если вы хотите достичь профессионального уровня выполнения автоматизированных действий или «оживления» предметов, то, так сказать, для поддержания марки, точность позиционирования при выполнении движений в каждый момент времени должна приближаться к 100 %. Однако вы можете заметить, что по мере повторения последовательности действий, записанных в script-файле, положение руки-манипулятора (паттерн-движения) будет отличаться от первоначального. Это происходит по нескольким причинам. По мере разряда батарей источника питания руки-манипулятора уменьшение мощности, подводимой к двигателям постоянного тока, приводит к снижению крутящего момента и скорости вращения двигателей. Таким образом, длина перемещения манипулятора и высота поднятого груза за один и тот же промежуток времени будет различаться для севших и «свежих» батарей. Но причина не только в этом. Даже при стабилизированном источнике питания частота вращения вала двигателя будет меняться, поскольку отсутствует регулятор частоты вращения двигателя. Для каждого фиксированного отрезка времени количество оборотов каждый раз будет немного отличаться. Это приведет к тому, что каждый раз будет различаться и положение руки-манипулятора. В довершение ко всему, в шестернях редуктора имеется определенный люфт, который также не принимается во внимание. Под влиянием всех этих факторов, которые мы здесь подробно рассмотрели, при выполнении цикла повторяющихся команд script-файла положение руки-манипулятора будет каждый раз немного различаться. Поиск исходного положения Можно усовершенствовать работу устройства, добавив в него схему обратной связи, которая отслеживает положение руки-манипулятора. Эта информация может быть введена в компьютер, что позволит определить абсолютное положение манипулятора. С такой системой позиционной обратной связи возможна установка положения руки-манипулятора в одну и ту же точку в начале выполнения каждой последовательности команд, записанных в script-файле. Для этого существует много возможностей. В одном из основных методов позиционный контроль в каждой точке не предусмотрен. Вместо этого используется набор концевых выключателей, которые соответствуют исходной «стартовой» позиции. Концевые выключатели определяют точно только одну позицию – когда манипулятор доходит до положения «старт». Чтобы это сделать, необходимо установить последовательность концевых выключателей (кнопок) таким образом, чтобы они замыкались, когда манипулятор достигает крайнего положения в том или ином направлении. Например, один конечный выключатель можно установить на основании манипулятора. Выключатель должен срабатывать только тогда, когда рука-манипулятор достигнет крайнего положения при вращении по часовой стрелке. Другие конечные выключатели нужно установить на плечевом и локтевом сочленении. Они должны срабатывать при полном разгибании соответствующего сочленения. Еще один выключатель устанавливается на кисти и срабатывает, когда кисть поворачивается до упора по часовой стрелке. Последний концевой выключатель устанавливается на захвате и замыкается при его полном открывании. Чтобы поставить манипулятор в исходное положение, каждое возможное движение манипулятора осуществляется в сторону, необходимую для замыкания соответствующего концевого выключателя до тех пор, пока этот выключатель не замкнется. После того как достигнуто начальное положение для каждого движения, компьютер будет точно «знать» истинное положение руки-манипулятора. После достижения исходного положения мы можем заново запустить программу, записанную в script-файле, исходя из предположения, что ошибка позиционирования во время выполнения каждого цикла будет накапливаться достаточно медленно, что не будет приводить к слишком большим отклонениям положения манипулятора от желаемого. После выполнения script-файла рука выставляется в исходное положение, и цикл работы script-файла повторяется. В некоторых последовательностях знание только исходного положения оказывается недостаточным, например при поднятии яйца без риска раздавить его скорлупу. В подобных случаях необходима более сложная и точная система позиционной обратной связи. Сигналы с датчиков могут быть обработаны с помощью АЦП. Полученные сигналы могут быть использованы для определения значений таких параметров, как положение, давление, скорость и вращающий момент. В качестве иллюстрации можно привести следующий простой пример. Представьте, что вы прикрепили небольшой линейный переменный резистор к узлу захвата. Переменный резистор установлен таким образом, что перемещение его движка вперед и назад связано с открытием и закрытием захвата. Таким образом, в зависимости от степени открывания захвата меняется сопротивление переменного резистора. После проведения калибровки, с помощью измерения текущего сопротивления переменного резистора можно точно установить угол раскрытия зажимов захвата. Создание подобной системы обратной связи вводит еще один уровень сложности в устройство и, соответственно, приводит к его удорожанию. Поэтому более простым вариантом является введение системы ручного управления для корректировки положения и движений руки-манипулятора в процессе выполнения script-программы. Система ручного управления интерфейсом После того как вы убедитесь, что интерфейс работает правильным образом, вы можете с помощью 8-контактного плоского разъема подключить к нему блок ручного управления. Проверьте положение подключения 8-контактного разъема Molex к головке разъема на плате интерфейса, как показано на рис. 15.10. Аккуратно вставьте разъем до его надежного соединения. После этого рукой-манипулятором можно управлять с ручного пульта в любой момент времени. Не имеет значения, соединен ли интерфейс с компьютером или нет.  Рис. 15.10. Подключение ручного управления Программа DOS управления с клавиатуры Имеется DOS программа, позволяющая управлять работой руки-манипулятора с клавиатуры компьютера в интерактивном режиме. Список клавиш, соответствующих выполнению той или иной функции, приведен в таблице. 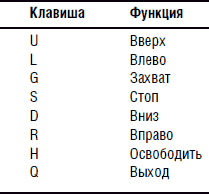 Голосовое управление рукой-манипулятором B голосовом управлении рукой-манипулятором используется набор распознавания речи (УРР), который был описан в гл. 7. В этой главе мы изготовим интерфейс, связывающий УРР с рукой-манипулятором. Этот интерфейс также предлагается в виде набора компанией Images SI, Inc. Схема интерфейса для УРР показана на рис. 15.11. В интерфейсе использован микроконтроллер 16F84. Программа для микроконтроллера выглядит следующим образом: ‘Программа интерфейса УРР Symbol PortA = 5 Symbol TRISA = 133 Symbol PortB = 6 Symbol TRISB = 134 Poke TRISA, 255 Poke TRISB, 240 Start: Peek PortB, B0 If bit4 = 0 then trigger ‘Если запись в триггер разрешена, читать схе му УРР Goto start ‘Повторение trigger: pause 500 ‘Ожидание 0,5 с Peek PortB, B0 ‘Чтение кода BCD If bit5 = 1 then send ‘Выходной код goto start ‘Повторение send: peek PortA, b0 ‘Чтение порта А if bit4 = 1 then eleven ‘Число есть 11? poke PortB, b0 ‘Выходной код goto start ‘Повторение eleven: if bit0 = 0 then ten poke portb, 11 goto start ‘Повторение ten: poke portb,10 goto start ‘Повторение end 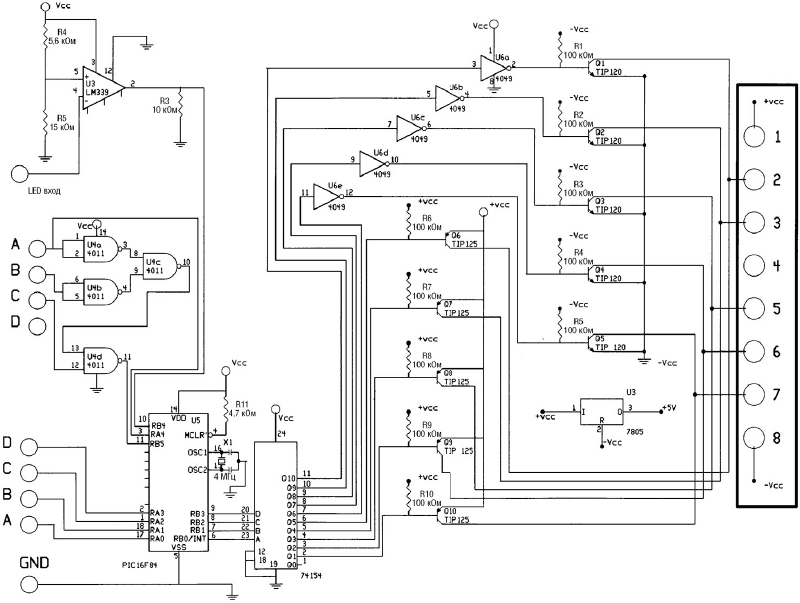 Рис. 15.11. Схема контроллера УРР для руки-робота Обновление программы под 16F84 можно бесплатно загрузить из http://www.imagesco.com Программирование интерфейса УРР Программирование интерфейса УРР аналогично процедуре программирования УРР из набора, описанного в гл. 7. Для правильной работы руки-манипулятора вы должны запрограммировать командные слова соответственно номерам, соответствующим определенному движению манипулятора. В табл. 15.1 приведены примеры командных слов, управляющих работой руки-манипулятора. Вы можете выбрать командные слова по вашему вкусу. Таблица 15.1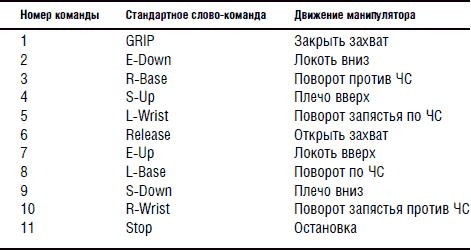 Список деталей для интерфейса PC • (5) Транзистор NPN TIP120 • (5) Транзистор PNP TIP 125 • (1) ИС 74164 преобразователь кода • (1) ИС 74LS373 восемь ключей • (1) Светодиод красный • (5) Диод 1N914 • (1) Гнездо разъема Molex на 8 контактов • (1) Кабель Molex 8-жильный длиной 75 мм • (1) Двухпозиционный переключатель • (1) Разъем уголковый типа DB25 • (1) Кабель DB 25 1,8 м с двумя разъемами М – типа. • (1) Печатная плата • (10) Резистор 100 кОм, 0,25 Вт • (3) Резистор 15 кОм, 0,25 Вт • (1) ИС регулятор напряжения 7805 Все перечисленные детали входят в комплект набора. Список деталей для интерфейса распознавания речи • (5) Транзистор NPN TIP 120 • (5) Транзистор PNP TIP 125 • (1) ИС 74154 4/16 – декодер • (1) ИС 4011 логический элемент ИЛИ-НЕ • (1) ИС 4049 – 6 буферов • (1) ИС 741 операционный усилитель • (1) Резистор 5,6 кОм, 0,25 Вт • (1) Резистор 15 кОм, 0,25 Вт • (1) Головная часть разъема Molex 8 контактов • (1) Кабель Molex 8 жил, длина 75 мм • (10) Резистор 100 кОм, 0,25 Вт • (1) Резистор 4,7 кОм, 0,25 Вт • (1) ИС регулятор напряжения 7805 • (1) ИС PIC 16F84 микроконтроллер • (1) Кварцевый резонатор 4,0 МГц • Набор интерфейса руки-манипулятора • Набор для изготовления руки манипулятора компании OWI • Интерфейс распознавания речи для руки-манипулятора • Набор устройства распознавания речи Детали можно заказать в: Images, SI, Inc. 39 Seneca Loop Staten Island, NY 10314 (718) 698-8305 |
|
|||
|
Главная | Контакты | Прислать материал | Добавить в избранное | Сообщить об ошибке |
||||
|
|
||||