|
||||
|
ЗА ЛУННЫМ КАМНЕМ. ЛУНОХОДЫ К 70-м годам в Советском Союзе создается новое поколение «лунных» космических аппаратов, позволявших решать широкий спектр научных задач. В основу конструктивного построения этих автоматических станций было положено их разделение на ступени, первая из которой (посадочная) представляла собой унифицированный автономный ракетный блок, обеспечивающий выполнение коррекции траектории при перелете Земля-Луна, выход на селеноцентрические орбиты с широким диапазоном орбитальных параметров, маневрирование в окололунном пространстве и, наконец, осуществление посадки в различных районах лунной поверхности. В качестве полезного груза ступень могла нести различное оборудование. Создание станций нового поколения стало решающим фактором при осуществлении выдающихся экспериментов в области изучения Луны с помощью космических аппаратов — забор лунного грунта с его доставкой на Землю и работа передвижных лабораторий на лунной поверхности. Однако прежде чем перейти непосредственно к этим экспериментам, рассмотрим более подробно элементы конструкции новых АС и их оборудование. Посадочная ступень включала в себя систему топливных баков, жидкостные ракетные двигатели с регулируемой тягой, приборные отсеки и амортизирующие опоры. На посадочной ступени монтировались микродвигатели и датчики системы ориентации, а также емкости с рабочим телом двигателя и антенны радиокомплекса. Основным силовым элементом посадочной ступени был блок топливных баков, состоявший из четырех сферических емкостей, соединенных в единую конструкцию. На них крепилась двигательная установка и все необходимое оборудование. Снизу к бакам пристыковывались амортизирующие опоры. Посадочная ступень имела два сбрасываемых отсека, каждый из которых состоял из двух топливных баков и расположенного между ними герметичного контейнера с аппаратурой системы астроориентации и автоматики радиокомплекса. В специальных отсеках (они отбрасывались перед заключительным этапом торможения при посадке) размещалось оборудование и топливо, необходимое для перелета к Луне. Двигательная установка новых АС состояла из основного однокамерного двигателя, двухкамерного двигателя малой тяги, управляющих газовых сопел и системы подачи топлива в камеру сгорания. Основной двигатель АС предназначался для проведения коррекции траектории и для торможения. Двигатели малой тяги работали непосредственно перед посадкой. Основной двигатель имел насосную подачу топлива в камеру сгорания и допускал возможность многоразового включения. Работал он в трех режимах — в диапазоне тяги 750-1930 кг. Двухкамерный двигатель малой тяги имел вытеснительную подачу топлива, мог включаться только один раз и работал в трех режимах — в диапазоне тяги от 210 до 350 кг. Каждая из опор посадочного устройства, предназначенных для гашения кинетической энергии станции в момент касания лунной поверхности и для сохранения устойчивого положения после посадки, состояла из V-образного подкоса, опорного диска и амортизатора. Во время старта ракеты-носителя с АС опоры были подняты и находились в сложенном состояния. После отделения станции от последней ступени ракеты- носителя опоры под действием пружины открывались в рабочее положение. Полет АС к Луне теперь осуществлялся в несколько этапов. После отделения от последней ступени и выхода станции на трассу перелета координационно-вычислительный центр, на основе траекторных измерений определяя отличие действительных траекторных параметров от расчетных, принимал решение о необходимой коррекции, вычисляя время включения двигателя и направление корректирующего импульса. Все эти данные в виде команд передавались на борт АС и закладывались в блок памяти системы управления. 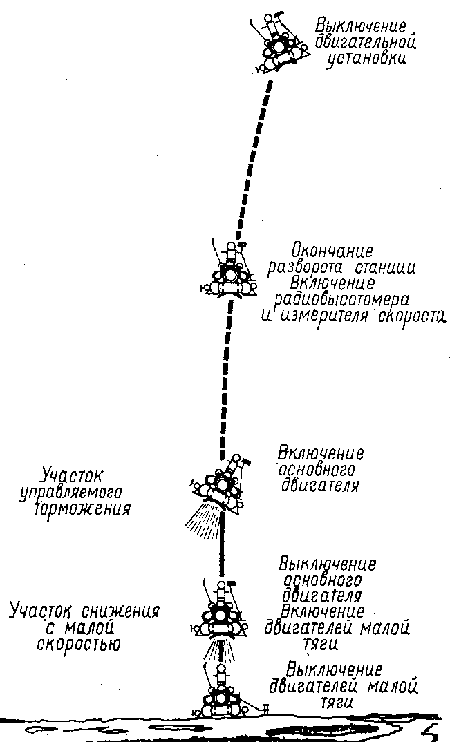 Рис. 6. Схема спуска АС «Луна-16» на поверхность Луны Перед включением корректирующего двигателя должен был быть произведен разворот станции и соответствующим образом измениться ее ориентация в пространстве. При этом сначала АС приводились в так называемое «базовое положение», когда чувствительные элементы системы ориентации «видят» Солнце и Землю. Затем с помощью разворотов вокруг двух осей АС устанавливалась в исходное положение. После того как в расчетное время по сигналу программно- временного устройства включался двигатель, гироскопические приборы, «запомнившие» нужное положение станции, с помощью управляющих органов «парировали» все возмущения, возникавшие при работе двигательной установки. Как только скорость станции изменялась на необходимую величину, автоматика подавала команду на выключение двигателя. По аналогичной схеме происходил вывод станции на окололунную орбиту или осуществлялась коррекция орбитального движения. После маневрирования в окололунном пространстве (так называемого процесса формирования посадочной орбиты) производилось уточнение параметров движения, и на борт АС выдавались кодограммы, определяющие последовательность операций при посадке. При приведении АС в исходное для торможения положение отбрасывались навесные отсеки, включалась двигательная установка и начинался спуск на лунную поверхность (рис. 6). Затем, когда станция получала необходимый тормозной импульс, двигатель выключался и АС совершала стабилизированный баллистический спуск, причем вертикальная и горизонтальная составляющие скорости при этом непрерывно измерялись с помощью доплеровской измерительной системы и высотомера. При определенных значениях вертикальной составляющей скорости движения и высоты над поверхностью основной двигатель включался вновь, а после окончания его работы запускался двухкамерный двигатель малой тяги, который уже окончательно гасил скорость АС (он выключался по команде, подаваемой от бортового гамма-высотомера). Для иллюстрации работы основного двигателя приведем значения высот над поверхностью в характерных точках участка спуска АС «Луна-17». Первое включение тормозного двигателя произошло на высоте 22 км над лунной поверхностью при продольной скорости АС 1692 м/с. На высоте 2,3 км двигатель выключился. Его второе включение произошло на высоте около 700 м, выключение — на высоте 20 м. В момент касания поверхности станция имела вертикальную скорость снижения около 3,5 м/с, боковая составляющая равнялась примерно 0,5 м/с. К автоматическим станциям, выполненным на базе унифицированной посадочной ступени, относятся АС «Луна-16, -20, -24», доставившие на Землю грунт из различных районов Луны, а также «Луна-17, — 21», на которых были установлены передвижные самоходные научные лаборатории «Луноход-1, -2» (см. Приложение). 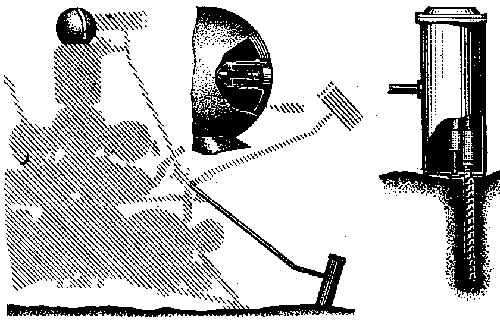 Рис. 7. Схема грунтозаборного устройства и возвращаемого аппарата станций «Луна-16» Операции по забору лунного грунта совершались с помощью грунтозаборных механизмов. Грунтозаборное устройство, используемое, например, при полетах АС «Луна-16, -20» (рис. 7), состояло из штанги с укрепленным на ней буровым станком и электромеханических приводов, перемещающих штангу в вертикальной и горизонтальной плоскостях. Рабочим органом бурового станка был виброударный бур с резцами на конце (внутри он был полым). Буровые механизмы обеспечивали работу с горными породами, имеющими широкий диапазон физико-механических свойств — от пылевато-песчаных до скальных. Максимальная глубина бурения составляла 35 см. Это оборудование приводилось в движение электродвигателями, скорость углубления бура в грунт и мощность, потребляемая электродвигателями, контролировались с Земли телеметрически. Бурение при работе АС «Луна-16» продолжалось около 6 мин и проводилось на полную глубину. В конце рабочего хода электродвигатели бурового станка автоматически отключались. Масса добытого образца составила около 100 г. Процесс бурения грунта в материковом районе АС «Луна-20» был более сложным. Несколько раз происходила автоматическая остановка бура из-за того, что ток в электродвигателях превышал допустимую величину. Проходка скважины проводилась на глубину около 300 см (в тексте опечатка, дано «м»). Масса добытого образца составляла 50 г. После выполнения всех необходимых операций станок отводился от грунта, поднимался и разворачивался на 180 градусов, а затем бур с находящимся внутри него грунтом помешался в герметически закрываемую капсулу возвращаемого аппарата. Автоматическая станция «Луна-24» была оборудована приспособлением для глубинного бурения. Это устройство включало в себя буровую головку, перемещающуюся по специальным направляющим, закрепленным на посадочной ступени, и ракете «Луна-Земля», буровую штангу с коронкой, механизм подачи буровой головки, эластичный грунтонос для размещения добытого грунта, механизмы для намотки грунтоноса с грунтом на специальный барабан и для помещения его в возвращаемый аппарат. Бурение производилось вращательным или ударно- вращательным движениями инструмента. Режим работы выбирался автоматически или по командам с Земли в зависимости от условий проходки, прочности и вязкости грунта. Установка позволила получить керн грунта диаметром 8 мм, максимальный рабочий ход буровой головки составлял 2,6 м. Масса образца, доставленного на Землю, — 170 г (фактическая длина добытого керна равнялась 1600 мм). Доставка лунного грунта на Землю выполнялась с помощью взлетной ступени АС, после старта с Луны так называемой «Лунной ракеты», которая состояла из двигательной установки (имеющей шаровые баллоны с топливом и ракетный двигатель с насосной подачей компонентов топлива в камеру сгорания), приборного отсека с аппаратурой управления и возвращаемого аппарата, в котором лунный грунт совершал перелет Луна-Земля, спуск в атмосфере и приземление. Возвращаемый аппарат имел шаровую форму и устанавливался вверху приборного отсека. Его оболочка была изготовлена из металла со специальным теплозащитным покрытием, предохраняющим от воздействия высоких температур на участке баллистического спуска в плотных слоях атмосферы. В возвращаемом аппарате размещались цилиндрический герметически закрываемый контейнер для лунного грунта, парашютная система, элементы автоматики, управляющие вводом в действие парашютной системы, аккумуляторные батареи, пеленгационные передатчики, радиоантенны и эластичные, наполненные газом, баллоны для обеспечения необходимого положения аппарата на поверхности Земли. Старт «Лунной ракеты» к Земле происходил по направлению лунной местной вертикали. Это направление «запоминалось» системой управления при посадке на Луну. В случае если продольная ось взлетной ступени могла быть отклонена от вертикали при взлете, система управления выдавала необходимые команды, благодаря которым ракета выходила на нужную траекторию. При достижении необходимой скорости разгона (например, у АС «Луна-16» она равнялась 2708 м/с) двигатель отключался, и «Лунная ракета» далее шла по баллистической траектории. В процессе перелета бортовой радиокомплекс обеспечивал связь с Землей и проведение траекторных измерений для уточнения места посадки возвращаемого аппарата. При подлете к Земле на борт АС передавалась команда на подрыв пиропатронов металлических лент крепления возвращаемого аппарата к приборному отсеку, и после того как благодаря движению в атмосфере космический аппарат гасил скорость до определенной величины, вводилась в действие парашютная система. Самоходные аппараты, управляемые с Земли, «Луноход-1, -2», предназначенные для проведения комплексных научных исследований при длительной работе на лунной поверхности, доставлялись с помощью АС «Луна-17, -21». «Луноходы» размещались на посадочной ступени и крепились днищами к четырем вертикальным стойкам через специальные пироузлы. На посадочной ступени устанавливались также трапы для схода передвижной лаборатории на лунную поверхность. Во время полета АС трапы находились в сложенном состоянии, а после посадки раскрывались под действием специальных пружин. Аппараты «Луноход» (общая масса около 800 кг) (рис. 8) состояли из двух основных частей: приборного отсека и самоходного шасси. Приборный, отсек предназначался для размещения научной аппаратуры и устройств, которые необходимо было предохранять от воздействия условий открытого космоса. Верхняя часть корпуса приборного отсека использовалась как радиатор в системе терморегулирования и закрывалась крышкой. На время лунной ночи крышка закрывалась и предохраняла отсек от излишней потери тепла, лунным же днем была открыта, способствуя сбросу избыточного тепла в пространство. На внутренней поверхности крышки размещались элементы солнечной батареи. Крышка могла устанавливаться под различными углами и обеспечивать оптимальное освещение солнечной батареи в процессе работы самоходного аппарата. Необходимый тепловой режим оборудования поддерживался как пассивными, так и активными методами. В качестве теплозащиты использовалась экранно-вакуумная изоляция на наружной поверхности приборного отсека (пассивный метод). Активная теплозащита осуществлялась регулированием температуры газа, циркулирующего внутри отсека. При помощи вентилятора и специальной заслонки газ направлялся в горячий или холодный контуры системы терморегулирования. Использовался и локальный обдув некоторых приборов с помощью отдельных каналов подвода газа.  Рис. 8. Схема самоходного аппарата «Луноход-1» Горячий контур включал в себя блок обогрева, размещенный сзади «Лунохода» (вне приборного отсека). Тепло в блоке вырабатывалось в процессе распада радиоактивного изотопа. Приборный отсек устанавливался на восьмиколесном шасси, обладавшем высокой проходимостью при относительно малой массе и энергопотреблении. Колеса «Лунохода» (рис. 9) имели независимую подвеску: в ступицу каждого колеса был вмонтирован электромеханический привод (поэтому каждое из них являлось ведущим). Упругими элементами здесь были торсионы; крепление колес обеспечивало преодоление уступов высотой 400 мм без удара об опоры. Привод колеса состоял из электродвигателя постоянного тока, щетки которого были изготовлены из специального материала, предназначенного для работы в вакууме, а также редуктора и механического тормоза с электромагнитным управлением. Выходной вал трансмиссии имел локальное ослабление сечения, чтобы он смог бы разрушиться подрывом пироустройства по команде с Земли (в случае его заклинивания). При этом данное колесо становилось ведомым и не мешало движению: конструкция шасси допускала одновременную разблокировку пяти из восьми колес без потери подвижности «Лунохода».  Рис. 9. Схема устройства колеса «Лунохода-1» Управление самоходным аппаратом велось по командам с Земли экипажем, состоящим из командира, водителя, штурмана, бортинженера и оператора остронаправленной антенны. В качестве информации, необходимой для управления, использовались телевизионное изображение местности перед «Луноходом», телеметрические данные бортовых гироскопов и датчиков пройденного пути, сведения о состоянии бортовых систем, крене и дифференте самоходного аппарата, токе двигателей колес и т. д. Командир экипажа осуществлял общее руководство работой и принимал окончательное решение на основании информации, поступающей от штурмана, бортинженера и водителя. Водитель непосредственно управлял «Луноходом», а штурман выполнял навигационные расчеты, выдавал рекомендации о направлении движения, отвечал за контроль пройденного пути. Бортинженер контролировал состояние всех систем аппарата, а оператор остронаправленной антенны следил за ее правильной ориентацией и обеспечением оптимальных условий связи. Особое телевизионное устройство использовалось при решении задач, связанных с управлением «Лунохода». Входящая в него электронная малокадровая телевизионная система вела передачу оперативной информации, применявшейся при «вождении» аппарата. В случае «Лунохода-1» эта система состояла из двух передающих камер, электронных блоков и автоматики. Телевизионные камеры были сконструированы на передающих трубках типа «видикон», способных к длительному и регулируемому запоминанию изображения (3- 20 с). Электромеханический затвор камеры имел основную выдержку 0,04 с при возможной смене выдержек: — на более короткую — 0,02 с и более длительную — до 20 с. Камера имела широкоугольный объектив с F =6,7 мм и D/F=1:4. Угол зрения в горизонтальной плоскости составлял 50°, а в вертикальной — 38° (ось визирования была наклонена вниз от горизонтали на 15°). Система обеспечивала телевизионную передачу со скоростью 3,2; 5,7; 10,9; 21,1 с на один кадр. Панорамная система телевизионных камер предназначалась для исследования свойств поверхности и наблюдений Солнца и Земли в целях навигации. Она давала четкие изображения с незначительными геометрическими и яркостными искажениями и включала в себя четыре камеры с оптико-механической разверткой по устройству, аналогичных используемым ранее при полетах АС «Луна-9, -13», но с лучшими параметрами. Две камеры, расположенные по разным бортам «Лунохода», имели горизонтальные оси панорамирования и передавали круговую панораму, в которую попадали, изображения лунного неба и поверхности вблизи колес «Лунохода». Две другие камеры обеспечивали получение панорам (с разных бортов), близких к горизонтальным, и каждая из них захватывала угол более 180°. Информация этой пары камер использовалась для изучения рельефа поверхности и топографической характеристики исследуемого района. Химический экспресс-анализ лунного грунта проводился с помощью рентгеновского спектрометрического метода (аппаратура РИФМА). Источники рентгеновского излучения выносного блока этой аппаратуры содержали Н3 (водород-3); детекторами излучения грунта были пропорциональные счетчики. Аппаратура РИФМА позволяла раздельно регистрировать рентгеновское излучение породообразующих элементов. Исследование физико-механических свойств грунта в естественном залегании велось с помощью специальной аппаратуры ПРОП (прибор оценки проходимости), в состав которой входили конусно-лопастной штамп для внедрения и поворота в грунте, а также датчик пройденного пути («девятое колесо»). При анализе также использовались данные о взаимодействии шасси «Лунохода» с грунтом, фотопанорамы, показания датчиков крена и дифферента и т. д. Кроме перечисленной аппаратуры, «Луноход-1» имел уголковый отражатель для лазерной локации передвижной лаборатории с Земли, аппаратуру для регистрации заряженных частиц и рентгеновского космического излучения. Второй советский самоходный аппарат «Луноход-2» решал сходные научные задачи и был аналогичным «Луноходу-1» по своей конструкции. Однако в состав его аппаратуры и служебных систем был внесен ряд усовершенствований: расширены возможности прибора для химического анализа грунта, повышена частота передачи изображения курсовыми телекамерами, для лучшего обзора местности одна из них была поднята на кронштейне и вынесена вперед. В состав оборудования были введены приборы для магнитных измерений, астрофотометрии и лазерной пеленгации. Многофункциональные космические аппараты поколения 70-х годов, предназначенные для исследований Луны, предоставили ученым новые возможности ее изучения. Началась эра лабораторного геохимического исследования вещества, доставляемого на Землю из различных районов Луны. В результате наши знания о ней достигли качественно нового уровня — менее чем за десять лет о Луне стало известно в некоторых отношениях даже больше, чем о нашей родной планете. Во многом это обусловилось тем, что хотя Луна, ее история и эволюция, сложнее, чем предполагалось ранее, но в геологическом и геохимическом планах наш естественный спутник оказался значительно проще Земли. Стало ясно, что, несмотря на одинаковый возраст обоих тел ~5 млрд. лет, основные черты внешнего облика Луны сформировались в первый миллиард лет после ее образования. Благодаря лабораторным исследованиям был определен абсолютный возраст многочисленных образцов коренных лунных пород, а имевшаяся ранее относительная временная последовательность лунных событий получила надежную привязку к конкретным датам. В разноцветной, многообразной и многослойной мозаике фактических данных о Луне все чаще стали появляться соединительные мостики, объединяющие первоначально несвязанные фрагменты. Многие из них, ранее не укладывавшиеся рядом, стали хорошо прилегать друг к другу, началась просматриваться общая картина образования Луны, изменений ее лица и внутреннего строения с возрастом, картина постепенного снижения активности процессов, действовавших на ее поверхности и в ее недрах. Первый автоматический «геолог» — «Луна-16» — прилунился в Море Изобилия, типично морском районе, поверхность которого сложена лавами базальтового характера. Взятый грунт представлял собой породы, заполнившие впадину моря, выбросы из крупных, близлежащих кратеров, породы, перемешенные из окружающих материковых районов. АС «Луна-20» опустилась уже на материковый участок с относительными перепадами высот до 1 км. Область эта более древняя, сформировавшаяся, по- видимому, значительно раньше Моря Изобилия. Море Кризисов («Луна-24») имеет ряд специфических особенностей. Его глубокая впадина заполнена лавой не так обильно, как соседние «моря». Считается, что эта относительно «молодая» лава изливалась на поверхность около 3 млрд. лет назад. В центре Моря Кризисов располагается маскон — гравитационная аномалия, вызванная локальной концентрацией массы. При планировании эксперимента рассчитывалось, что в образце будут присутствовать породы, несущие следы процессов поздних этапов магматической эволюции Луны. Предполагалось наличие в нем пород глубинного, подбазальтового слоя, выброшенных на поверхность при образовании окрестных кратеров, например, «Фаренгейт» или «Пикар-Х». И уж совсем было бы заманчиво добыть частичку вещества маскона. Вот так примерно выстраивалась канва трех последовательных экспериментов по бурению лунной поверхности, добыче образцов грунта и исследованию его в земных лабораториях с применением всего комплекса имеющихся средств. Лунный грунт, добытый с различных глубин и доставленный советскими автоматическими станциями, изучался и продолжает изучаться в лабораториях многих стран мира. Объектом исследования часто являются отдельные частицы грунта, которых в каждом грамме лунного вещества содержится несколько миллиардов. Частицы представляют собой раздробленные и перемешанные фрагменты коренных пород исследуемого района с небольшим вкладом частиц из соседних районов и метеоритного вещества, как с неизменным, так и видоизмененным микрометеоритной бомбардировкой внешним видом. Поэтому образец грунта даже небольшого объема имеет весьма типичный вид для пород данного региона. Лунный грунт, доставленный на Землю с помощью АС «Луна-16», представляет собой зернистый порошок, хорошо формующийся и слипающийся в отдельные комочки. Зернистость грунта увеличивается с глубиной. В среднем преобладают зерна размером 0,1 мм. Медианный размер зерен увеличивается с глубиной от 0,07 до 1,2 мкм. По своему составу лунные образцы близки к земным базальтам, но с повышенным содержанием титана и железа и уменьшенным количеством натрия и калия. Лунный грунт хорошо электризуется, его частицы прилипают к контактирующим с ним поверхностям. В лунном реголите отчетливо выделяются две разновидности частиц: одни с угловатой формой, внешне похожие на земные раздробленные породы; другие же (их значительно больше) имеют скатанную форму и носят следы оплавления и спекания, многие из них по своему виду напоминают стеклянные и металлические капли. Грунт из материкового района, доставленный АС «Луна-20», существенно отличается от предыдущей пробы. Он оказался значительно светлее, его основу составляли обломки кристаллических пород к минералы, а окатанных и ошлакованных (остеклованных) частиц обнаружилось относительно мало. В противоположность грунту из морского района вместо базальта основными здесь являются анортозиты и их разновидности — породы основного состава, но богатые полевым шпатом. Колонка грунта из Моря Кризисов, доставленная с помощью АС «Луна-24», характеризуется хорошо заметной слоистостью; слои отличаются толщиной, цветом и размером частиц. Окраска образца неравномерная: верхняя часть окрашена в однородный серый цвет с коричневым оттенком, нижняя неоднородна в цветовом отношении и состоит из нескольких слоев серого цвета и резко выделяющегося слоя белого материала. В целом грунт более светлый, чем образец из Моря Изобилия, но существенно темнее грунта, доставленного «Луной-20». Кроме того, грунт станции «Луна-24» отличается от двух других образцов высоким содержанием относительно крупных фрагментов. В образце широко представлены обломки магматических пород, среди них преобладают породы типа габбро. Стеклянные сферические частицы обнаруживаются только в верхней части колонки, но и там их немного. Они составляют несколько более 1 % от общего количества частиц. Интересно, что в образце грунта из Моря Кризисов обнаружены темные непрозрачные стекла, представляющие собой пористые, угловатые обломки неправильной формы. Основная масса частиц имеет матовую шероховатую поверхность. Такие обломки не встречаются в образцах, доставленных на Землю с помощью АС «Луна-16» и «Луна-20». Происхождение этих стекол не совсем ясно, часть из них имеет, по всей вероятности, вулканогенный характер. Передвижные автоматические научные лаборатории «Луноход» предназначались для проведения длительных комплексных научных и научно-технических исследований на поверхности Луны при перемещении самоходного аппарата на значительные расстояния от места посадки. Первый аппарат этого типа — «Луноход-1» «работал» в Море Дождей, типично «морском» участке лунной поверхности. Второй — «Луноход-2» в восточной окраине Моря Ясности (место посадки — кратер Лемонье). В результате тектонических процессов этот кратер подвергся частичному разрушению. Его дно превратилось в «залив», а сохранившаяся часть вала образовала уступ на границе Моря Ясности и горного массива Тавр. Южнее места посадки «морская» поверхность кратера переходит в холмистую равнину — предматериковую местность. В прибрежной части кратера находится тектонический разлом, протянувшийся с севера на юг почти на два десятка километров. Ширина разлома несколько сот метров, глубина колеблется от 40 до 80 м. Эта трещина возникла после затопления лавой, хотя, возможно, и является обновлением древнего тектонического разлома, который прослеживается далее в материковом районе за валом кратера. Передвижные лаборатории «Луноход» оснащены аналогичным набором инструментов для изучения физических характеристик Луны, и их научные задачи были во многом сходными. В программу исследовании входили: изучение геолого-морфологических характеристик района и его топографии, анализ химического состава грунта по трассе движения, определение физико-механических свойств поверхности и проведение лазерной локации Луны. Кроме того, в программу «Лунохода-l» были включены эксперименты по регистрации солнечного и галактического рентгеновского излучений и космических лучей. «Луноход-2», в свою очередь, был оснащен приборами для проведения магнитных измерений, астрофотометрии и лазерной пеленгации. Изучение механических свойств поверхностного слоя лунного грунта было основано на определении прочностных и деформационных характеристик реголита в его естественном залегании. При этом предполагалось: получить с помощью специальной аппаратуры сведения о несущей способности грунта, его уплотняемости и сопротивлении вращательному срезу; изучить взаимодействие ходовой части с грунтом — для оценки свойств материала поверхности по всей трассе движения; проводить анализ телевизионных изображений, позволяющих по глубине колеи «Луноходов» и характеру деформации грунта под воздействием их колес выявлять особенности структуры грунта и его строения. Результаты, полученные с помощью «Лунохода-1», показали, что несущая способность реголита в различных точках поверхности менялась в довольно широких пределах и в большинстве случаев составляла 0,34 кг/кв. см. Сопротивление вращательному сдвигу было в среднем около 0,048 кг/кв. см. Несущая способность самого верхнего пылевого слоя находилась в пределах 0,02-0,03 кг/кв. см. Наибольшее сопротивление внедрению аппаратуры в грунт было отмечено на участках, не усеянных камнями, наименьшее — в районе кольцевых валов кратеров. Обнаружилась способность лунного грунта к значительному уплотнению и упрочению при повторном нагружении. При измерениях параметров грунта, лежащего на глубине 8-10 см и обнажаемого при маневрах «Лунохода», были выявлены более высокие показатели механических свойств: несущая способность около 1 кг/кв. см, сопротивление сдвигу 0,06 кг/кв. см. Для проведения магнитных измерений по трассе движения и во время остановок «Луноход-2» имел на своем борту трехкомпонентный феррозондовый магнитометр. Анализ этих измерений указывает на неоднородность магнитного поля поверхности Луны: компонент магнитного поля, параллельный поверхности, при измерениях по трассе движения «Лунохода» менялся от 5 до 60 гамм, обнаружены магнитные аномалии, свойственные кратерам (в районе отдельных кратеров отмечены перепады поля до 3 гамм/м). Магнитные измерения, проведенные в районе тектонического разлома и вала кратера Лемонье, дали возможность оценить намагниченность пород, расчлененных трещиной, а также материковых пород вала кратера. Геолого-морфологические исследования районов, по которым двигались «Луноходы», были направлены на получение данных о рельефе и выявление характерных геологических образований, на установление их взаимосвязи и эволюции и определение особенностей микрорельефа и слагающих пород. Анализ материалов, полученных в Море Дождей, показал, что основной формой микрорельефа в этом районе являются кратеры. На изображениях хорошо просматривались кратеры размером до 50 м. Были выделены в специальную группу отрицательные формы рельефа диаметром менее 10 см, имеющие специфические особенности. Кратеры в этом районе имели характерную чашеобразную форму, их облик менялся от четкого к расплывчатому, в соответствии с чем они были сгруппированы в три морфологических класса — А, В и С. Кратеры класса А, как правило, имели четко выраженный вал или резкую границу с окружающей поверхностью. Отношение глубины к диаметру (H/D) для кратеров этого класса лежит в пределах 1/4-1/5. Крутизна внутренних склонов в верхней части составляла 35–45°. Кратеры класса В более сглажены: отношение H/D для них около 1/8, максимальная крутизна внутренних склонов редко достигает 30°. Кратеры класса С имели наименьшую относительную глубину (H/D = 1/14), крутизна их склонов 8-10°, причем отсутствовали четкие границы. Все кратеры располагаются на поверхности случайным образом, что характерно для форм рельефа экзогенного происхождения. Часть кратеров, видимо, образовалась в результате вторичных ударных процессов — падений обломков породы малой прочности с невысокой скоростью. Обломки горных пород на поверхности — обычный элемент лунного ландшафта. Геолого-морфологические исследования также включали в себя изучение мощности и вертикального разреза слоя реголита, его структуры и гранулометрического состава. Данные анализа геологической обстановки приводят к выводам о том, что поверхностные породы Моря Дождей кристаллизовались после их расплава в период 3,2–3,7 млрд. лет назад. Кратеры в основной массе имеют ударно- взрывное происхождение, а морфологические различия связаны с их эволюцией. Крупнообломочный материал, по-видимому, возник в результате дробления скального основания при образовании кратеров. Мощность реголита лежит в пределах 2–6 м, а в отдельных случаях может достигать 50 м. При переходе от молодых кратеров к старым закономерно меняется микроструктура верхнего слоя реголита от щебнистой к комковатой и ячеисто-комковатой, а гранулометрический состав становится более тонким. Непосредственно под слоем реголита, по всей видимости, находятся породы типа брекчий базальтового состава, ниже — базальты. За время своей работы советские самоходные аппараты, управляемые с Земли, прошли маршрут длиной около 50000 м, передали более 300 панорам и 100000 снимков, провели многократные исследования физико-механических и химических свойств грунта. |
|
|||
|
Главная | Контакты | Прислать материал | Добавить в избранное | Сообщить об ошибке |
||||
|
|
||||