|
||||
|
СИСТЕМЫ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ С целью более подробного, всестороннего изучения космических объектов во всем спектре электромагнитного излучения и глобального изучения Земли в космическое пространство за пределы земной атмосферы выводятся искусственные космические объекты. Это искусственные спутники Земли (ИСЗ) и межпланетные станции, которые самостоятельно проводят определенные научные исследования. Полет автоматического КА — не самоцель. Главное — это то, что в космическое пространство доставляется приборы, научное оборудование, с помощью которых можно проводить научные исследования, наблюдения, эксперименты. Но один прибор в космическое пространство не отправишь. Для его приведения в действие необходима энергия (в самом простейшем случае электроэнергия), кто-то или что-то должно направить прибор объективом или датчиком в направлении интересующего нас объекта: звезды, планеты и т. д. Полученные же данные или результаты наблюдении надо доставить на Землю. Для проведения исследовании в космическом пространстве и доставки результатов научных и технических экспериментов и созданы автоматические КА. Главный его элемент — научная аппаратура — оброс всевозможными служебными системами, предназначенными для поддержания ее в работоспособном состоянии, для наведения на объект исследования, для проведения эксперимента и доставки результата исследования на Землю. Так рядом с научным прибором появилась конструкция автоматического КА, нужная для размещения как самого прибора, так и обслуживающих его систем. К системам КА относят радиотелсмстричсский комплекс, систему единого питания, систему ориентации, систему управления, систему терморегулирования, двигательную установку, систему отделения, систему разделения и др. Рассмотрим теперь подробно, что это за системы и для чего они необходимы. Система отделения. Перед запуском на орбиту автоматический КА жестко крепится на последней ступени ракеты-носителя. Необходимость такого крепления вызвана транспортировкой всего ракетно-космического комплекса (ракеты-носителя с автоматическим КА), как правило, в горизонтальном положении. Узлы крепления выдерживают в этом случае нагрузку от консольно закрепленного автоматического КА и дополнительную перегрузку, возникающую от вибрации при движении к стартовому устройству, а также при выводе на орбиту. Но это же крепление должно легко освободить автоматический КА от последней ступени ракеты-носителя после выведения его на орбиту. 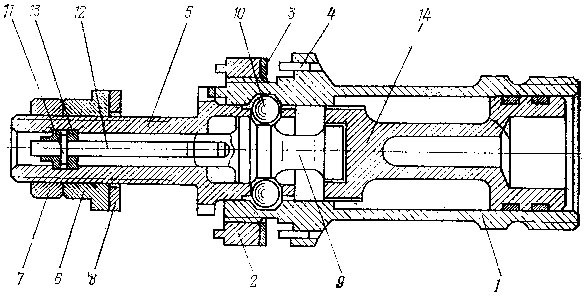 Рис. 1. Схема шарикового замка Одним из наиболее распространенных способов крепления автомагического космического аппарата к ракете является крепление с помощью шариковых замков (рис. 1), которые устанавливаются в нескольких точках, симметрично расположенных по периферии стыковочной плоскости. Замков может быть три, но с увеличением массы автоматического КА, как правило, устанавливается четыре с целью создания более симметричной и равномерно распределенной нагрузки на узлы крепления КА к ракете. По периферии стыковочной плоскости между замками установлены так называемые шпильки, на которые КА свободно насаживается, причем они не препятствуют его отделению, а только помогают шариковым замкам удерживать КА от боковых перемещений. На шариковые замки наворачиваются гайки, и автоматический КА жестко крепится к верхнему торцу раксты-носитсля. Внешне шариковый замок напоминает очень крупный болт: его корпус (1) устанавливается в отверстие на ракете-носителе и закрепляется в ней с помощью гайки (2) и шайбы (3). От проворота шариковый замок в месте крепления удерживается штифтами (4). На гильзу (5) надвигается (отверстием в кронштейне) автоматический КА и закрепляется с помощью гайки (6), контргайки (7) и шайбы (8). Шток (9) своими заплечиками удерживают шарики (10) в таком положении, чтобы они жестко скрепляли корпус (1) и гильзу (5). При хранении и транспортировке автоматического КА с ракетой-носителем чека (11), соединяющая валик (12) и гайку (13), не дает возможности сдвинуться штоку (9) и освободить шарики (10). И для раскрытия замков необходимо с достаточно большим усилием вдвинуть внутрь поршень (14). Это усилие, передаваемое через шток (9) и валик (12), срезает чеку (11), что дает возможность продвинуться штоку и освободить шарики, которые свободно сдвигаются к оси замка. Корпус (1) и гильза (5), ничем не удерживаемые, раздвигаются, автоматический КА и ракета-носитель освобождаются друг от друга. Через несколько секунд после вывода автоматического КА на орбиту ИСЗ программное устройство выдаст команду на подрыв пиропатронов системы разделения. Образующиеся газы толкают поршень, и происходит раскрытие шариковых замков. Отход автоматического КА от ракеты-носителя осуществляется либо с помощью пружинных толкателей, либо за счет давления газов, образующихся в пороховых аккумуляторах давления. В момент разделения срабатывает пружинный датчик, который включает все системы автоматического КА. Теперь можно проводить научные исследования. Система электропитания. На Земле в цехах или лабораториях мы приводим в действие различные устройства или приборы, подавая на них напряжение электрического тока от аккумулятора, батареек или электросети. На автоматическом КА для этой цели служит система единого электропитания. Ведь без источника энергии научные приборы и служебные системы КА мертвы. Для приведения их в рабочее состояние необходимо подать электрическую энергию, источником которой на борту автоматического КА могут быть химические аккумуляторные батареи, солнечные батареи, радиоизотопные источники электрического питания и т. д. На простейших автоматических КА с малым сроком активного существования применялись химические аккумуляторные батареи. Аккумуляторы заряжались перед полетом на наземных зарядных станциях и в зависимости от емкости аккумуляторов и мощности потребляемой на борту всей аппаратурой энергии определялось время активного существования ИСЗ. Автоматические КА, предназначенные для длительного активного существования и потребляющие в процессе полета относительно большое количество электроэнергии, в качестве основного источника этой энергии чаще всего используют солнечные батареи. При больших суммарных потребностях в электрической энергии становится необходимым применять не запасенную заранее энергию (для нее потребовались бы громоздкие и очень массивные аккумуляторы), а постоянно пополняемую электрическую энергию от внешнего источника. Солнечные батареи как раз позволяют использовать лучистую энергию, идущую от Солнца, и преобразовывать се в электроэнергию, которую можно либо сразу же расходовать, либо запасать в аккумуляторах. Однако на практике, как правило, применяют и солнечные батареи, и химические аккумуляторные батареи. Элемент солнечной батареи — это пластинка из полупроводника, чаще всего из кремния. В верхний наружный слой кремния введены легирующие добавки, в результате чего этот слой под действием светового облучения легко отдаст электроны в нижележащие слои — на пластинке возникает разность потенциалов. Сверху и снизу пластинки размещены электроды, и при соединении их проводником образуется электрическая цепь, в которой под действием разности потенциалов потечет ток. Правда, с одной пластинки количество снимаемой электрической энергии невелико. В космосе, в районе орбиты Земли, на перпендикулярную солнечным лучам площадку 1 м2 Солнце за 1 с посылает энергию 1400 Дж. Если бы удалось всю эту энергию преобразовать в электрическую, то можно было бы снимать мощность 1,4 кВт с площади около 1 м2. Но фактически коэффициент полезного действия зависит от различных факторов, даже от температуры самих кремниевых элементов. Теоретический КПД преобразования энергии солнечного излучения в электрическую может достигать 22 %. Практический коэффициент полезного действия реальных кремниевых преобразователей, используемых на автоматических КА, максимально достигает 10 %. Следовательно, пластинки кремния для получении требуемой электрической мощности надо набирать на большой площади. Пластинки крепятся на панели, называемые панелями солнечных батарей. Для крупных автоматических КА площади панелей солнечных батарей достигают больших размеров, исчисляемых не одним десятком квадратных метров. Взамен кремниевых преобразователей можно применять более дорогие, но с большим КПД элементы (например, из арсенида галлия). В случае применения солнечных батарей необходимо поддерживать их панели в положении, перпендикулярном солнечным лучам. Следовательно, для автоматического КА, занимающегося научными исследованиями различных участков звездного неба или районов Земли, требующими разворотов всего КА, необходимо специальное крепление панелей солнечных батарей. Основная цель этого крепления — непрерывное отслеживание панелей за Солнцем при разворотах КА (как это, например, осуществлено на ИСЗ "Метеор"). Панели на общей раме могут вращаться вокруг продольной оси КА и поворачиваться вокруг перпендикулярной. На небольших по размерам ИСЗ этот вопрос решен по-иному: со всех сторон корпуса КА закрепляются элементы солнечных батарей, что позволяет получать достаточно энергии с отдельных участков солнечной батареи, освещенных в каждый момент Солнцем при разворотах ИСЗ. При полете к планетам, ближе расположенным к Солнцу, т. е. к Венере и особенно к Меркурию, солнечные батареи в результате увеличения солнечного излучения будут вырабатывать большее количество электричества с более высоким напряжением электрического тока. Поэтому можно уменьшить площадь панелей солнечных батарей. Так, например, на КА «Маринср-10», специально созданном для полета к Меркурию, площадь панелей была уменьшена по сравнению с предыдущими аппаратами этого типа на 30 %. Но близость к Солнцу ставит задачу и не допустить перегрева солнечных батарей, что могло бы значительно понизить КПД преобразователей лучистой энергии в электрическую. Ведь тепловой поток у Меркурия в 4,8 раза больше, чем в районе Земли. С целью уменьшения количества тепловой энергии, падающей на панели солнечных батарей, их сделали поворотными. При приближении к Солнцу они поворачивались, и их плоскость, покрытая элементами из полупроводника, отворачивалась от направления на наше светило иа некоторый угол. Величина этого угла менялась в зависимости от расстояния до Солнца: если иа полпути к Венере поворот составлял 30°, то затем последовательно реализовывались углы 50, 65 и 70°, а близ Меркурия — 76°, т. е. солнечные лучи при этом как бы скользили по наклонной плоскости. С удалением от Солнца количество лучистой энергии резко уменьшается. Поэтому в отдельных случаях, как правило при полетах к внешним планетам, вместо солнечных батарей на автоматических КА применяются изотопные источники. При распаде атомных ядер радиоактивных элементов выделяется большое количество энергии. Эта энергия специальными преобразователями превращается в электрическую, которая используется на борту автоматического КА. В будущих КА предполагается применять в качестве источника энергии компактную атомную электростанцию. Это значит, что на борту автоматического КА будет устанавливаться миниатюрная электростанция с ядерным реактором и преобразованием тепловой энергии в электрическую с помощью электрогенераторов и турбинного привода. При осуществлении полетов на Луну с целью изучения сейсмичности нашего естественного спутника на его поверхность были доставлены сейсмографы и радиопередающая аппаратура. Причем в качестве источника питания применялась радиоизотопная энергетическал установка. В ней использовался радиоактивный плутоний, при массе которого 3,7 кг обеспечивалась в течение года номинальная электрическая мощность не менее 63 Вт. Плутоний, имеющий период полураспада около 90 лет, помещался в капсулу и в процессе распада выделял тепловую энергию мощностью порядка 1500 Вт, а та с помощью термопар преобразовывалась в электрическую. Капсула размещалась в контейнере, снабженном графитовым теплозащитным экраном и дополнительным бериллиевым экраном, рассчитанным на обеспечение радиационной защиты радиопередающен аппаратуры. Одним из вариантов электрического генератора является применение топливных элементов. Безусловно, солнечными батареями и аккумуляторной батареей система электропитания не ограничивается, она включает в себя также блок силового питания и контроля, блок дополнительной коммутации, регулятор гока, статические и машинные преобразователи, счетчик ампер-часов и др. Причем блок силового питания и контроля предназначен для создания электрических цепей и распределения электрической энергии по различным системам автоматического КА, а также для снабжения электрической энергией научных приборов. Кроме того, этот блок осуществляет контроль за величинами тока и напряжения у потребителей (систем) и выдает эти данные в ралиокомплекс для передачи на Землю. На автоматических КА специального назначения (например, на ИСЗ "Астрон") применяется блок дополнительной коммутации, обеспечивающий цепи питания специальной аппаратуры (в данном случае ультрафиолетового телескопа и рентгеновской аппаратуры). Включение этой аппаратуры осуществляется только в сеансах проведения наблюдений звездного неба. При этом блок дополнительной коммутации одновременно контролирует величину токовой нагрузки, а также (с помощью радиокомплекса) выдает эти значения на земные пункты приема информации. В отечественной космонавтике исторически сложилось так, что величины напряжения, на которые рассчитаны разнообразные бортовые приборы, составляют 14 и 27 В. Дело в том, что именно эти значения напряжения использовались и используются в отечественной авиации. Заимствуя первоначально отдельные приборы из авиационной промышленности, космическая техника вынуждена была использовать на борту ИСЗ напряжение 14 или 27 В. И в настоящее время на большинстве советских автоматических КА применяется постоянный ток напряжением 27 В. Однако для раскрутки роторов гироскопов и поддержания большего числа оборотов наиболее выгодно применять переменный ток, и чем выше частота этого тока, тем легче добиться большего количества оборотов ротора. Поэтому на советских автоматических КА применяются статические и машинные преобразователи, которые, включенные в постоянный ток напряжением 27 В, преобразуют его в однофазный переменный ток напряжением 40 В частотой 500 или 1000 Гц. В системе единого питания солнечные батареи заряжают химическую буферную батарею. Во время проведения сеансов при подключении мощных потребителей тока, таких, как радиокомплекс и специальная научная аппаратура, электроэнергия расходуется из аккумуляторной батареи. В период между сеансами (так называемый дежурный режим) потребление электроэнергии незначительно, и солнечная батарея покрывает этот расход и одновременно подзаряжает аккумуляторную батарею. Поэтому аккумуляторная батарея работает в режиме повторяющихся циклов заряд-разряд. Необходимо знать величину заряда батареи в ампер-часах, чтобы не допустить полного разряда батареи, влекущего к выходу батареи из строя. С этой целью в систему единого питания введен счетчик ампер-часов, позволяющий определить величину заряда аккумуляторной батареи и принять необходимые меры при планировании длительности проведения сеанса связи с одновременным проведением научных исследований. Регулятор тока обеспечивает нормальную работу системы электропитания. Солнечная батарея расчленена на соединенные параллельно секции. Регулирование тока солнечной батареи производится путем подключения и отключения секций по радиокомандам или по сигналам бортовой автоматики. Для защиты буферной батареи в сеансах связи от переразряда в системе электропитания предусмотрена так называемая схема минимального напряжения. В том случае когда при длительном большом потреблении электроэнергии напряжение на батарее может понизиться ниже допустимого в течение некоторого относительно большого промежутка времени (порядка полминуты), выдается сигнал для отключения сеансной нагрузки (передатчиков, научной аппаратуры и т. д.). При этом остается только дежурная нагрузка — вентиляторы и приемники. Новый же сеанс радиосвязи возможен лишь при пополнении заряда аккумуляторной батареи от солнечных батарей. Для защиты буферной батареи в дежурном режиме от перезаряда предусмотрена так называемая схема максимального напряжения, состоящая из датчиков, срабатывающих при повышении напряжения на батарее выше допустимого уровня, и датчиков в аккумуляторах, срабатывающих при превышении давления в процессе заряда. Причем регулятором тока ограничивается заряд буферной батареи путем отключения нескольких секции солнечных батарей. Таким образом, система электропитания напоминает сложное наземное электрохозяйство со множеством энергопотребителей, преобразователей, переключений, автоматов защиты и пр. Пусть теперь подано питание на научную аппаратуру, уже проведены и даже получены первые результаты. И вот чтобы доставить их на Землю, необходим радиотелсметричсский комплекс. Радиотелеметрический комплекс. Однако не только для одной этой задачи на КА размещен радиотелеметрический комплекс. Вообще говоря, он предназначен для выполнения следующих функций: проведения траекторных измерений (дальности, радиальной скорости и угловых координат КА); приема с Земли команд управления и уставок, их обработки и выдачи в бортовые устройства для исполнения; передачи с аппарата и регистрации на Земле служебной и научной телеметрической информации в режимах как непосредственной передачи, так и воспроизведения информации, записанной на запоминающем устройстве; передачи и регистрации на Земле фототелевизионной информации после сеанса фотографирования небесных объектов; приема и записи на видеомагнитофон телевизионной и телеметрической информации со спускаемого аппарата для межпланетных станций и последующем передачи этой информации на Землю. Траекторпые измерения проводятся систематически из ряда наземных пунктов, причем в сеансах связи многократно измеряется расстояние до КА и определяется радиальная скорость путем измерения доплеровского смещения несущей частоты бортового передатчика. Все эти измерения, а также замеры угловых координат КА обрабатываются с помощью быстродействующих ЭВМ и используются для определения фактических параметров траектории. Как правило, радиосвязь с КА осуществляется по дециметровому и сантиметровому диапазонам. Эго обусловлено возможностями пропускания электромагнитного излучения через атмосферу. Бортовой радиокомплекс — это сложная система, состоящая из целого ряда блоков, приборов и устройств. В состав раднокомплскса входят передатчики сантиметрового и дециметрового диапазонов, приемники, усилители, фототелевизионная установка с блоком питания, блоки дальности, задающие генераторы, блоки выделения команд, блоки автоматики, блоки телеметрической системы, программно-временное устройство, видеомагнитофон и др. В зависимости от способа получения изображения применяют различные фототслсвизионные системы КА. В одном из них используются системы, напоминающие фотоаппарат и проводящие съемки циклически (по 10–12 кадров в цикле). В компактном аппарате имеется устройство для проведения химикофотографической обработки пленки, т. е. проводится проявление, промывка, закрепление, сушка и химическая защита пленки (снятие вуали, обусловленной воздействием проникающей космической радиации). Затем считывающее устройство передаст отснятый и обработанный цикл кадров на Землю, причем считывание может осуществляться с различным числом строк разложения. Сначала на Землю передается малое число строк разложения, но с большой скоростью, чтобы быстро пронести экспресс-анализ качества того или иного кадра. Затем, после выбора самых лучших, т. е. наиболее богатых характерными деталями, кадров передача может вестись уже с большим числом строк разложения, когда в кадре различается множество деталей рельефа местности. Есть и еще один способ получения изображения — с помощью сканирующей оптико-механической системы. Она хотя и не может передавать динамические изображения, но выгодно отличается от электронных телесистсм высокой надежностью, небольшими габаритами, незначительной массой, малым энергопотреблением. Именно этим способом получены первые лунные панорамы с помощью автоматических КА «Луна-9» и «Луна-13», а также панорамы Венеры с помощью КА «Венера-9» и «Венсра-10». На советских «Луноходах» так же с использованием такого метода во время их стоянок передавались панорамы окружающей лунной поверхности. Причем для передачи цветного изображения один и тот же участок местности просматривается последовательно через три светофильтра, автоматически сменяемых перед объективом. Это подобно тому, как в цветном телевизоре применяется три канала передачи для красного, синего и зеленого цветов, которые при различных количественных соотношениях дают всю гамму цветового изображения. Полученные же на Земле изображения окрашиваются соответствующим цветом, и методом накладывания их друг на друга образуется одно изображение, точно передающее близкие к естественным цвета далекой планеты. В состав радиокомплекса КА входит и телеметрическая система, которая предназначена для передачи информации на Землю о функционировании основных систем КА в процессе полета, а также для передачи научной информации. Телеметрическая система включает в себя множество датчиков, установленных в различных системах КА и на научной аппаратуре. Датчики — это температурные, контактные или потенциометрические устройства, способные преобразовывать реальные физические величины в различные по величине напряжения электрического тока. Для обеспечения высокой точности показаний датчиков в телеметрической системе применен автономный блок питания, напряжение которого строго поддерживается относительно заданного уровня. В телеметрическую систему входит также и запоминающее устройство, аналого-цифровой преобразователь. блок логики и т. д. Сигналы датчиков поступают на аналого-цифровой преобразователь и на автоматику радиокомплекса. Режим опроса датчиков, скорость передачи, запись и воспроизведение устанавливаются автоматикой КА или по команде с Земли. На Земле полученные сигналы расшифровываются и с помоии. ю таблиц и графиков переводятся в замеренные на борту реальные физические величины: напряжение, силу тока, давление газов, температуру в различных местах аппарата, мощность космического излучения, освещенность и т. д. Помимо чисто радиотехнической аппаратуры, радиокомплекс в своем составе имеет ЭВМ, которая служит для автономного управления аппаратурой во время полета. В памяти ЭВМ заложены программы проведения типовых сеансов, и при отсутствии команды с Земли об отмене программы ЭВМ начинает сеанс в запланированное время. Следует сказать, что проведение сеансов связи регламентируется орбитой полета автоматического КА с учетом вращения Земли: сеансы могут проводиться только при наличии прямой радиовидимости КА с пункта наземной радиосвязи. Работающий радиокомплекс излучает энергию с заключенной в ней информацией через антенну, соединенную с передатчиком фидером — высокочастотным кабелем. Антенно-фидсрное устройство предназначено для совместной работы с радиокомплексом; в его состав входят различного рода антенны, кабели, волноводы, антенные переключатели, ответвителн, фильтры и т. д. Антенны, устанавливаемые на автоматическом КА, быкают малонанравленныс (штыревые и спиральные конические) и остронаправлснные (параболические и так называемые антенные решетки). На КА, работающих на орбите ИСЗ, в подавляющем большинстве случаев (за исключением связных ИСЗ) применяются малонаправленныс антенны. В связи с тем что ИСЗ находятся относительно близко от приемных пунктов, сигнал с таких антенн достаточно мощный, и применение нескольких антенн, расположенных с разных сторон ИСЗ, дает уверенный прием сигнала при любой ориентации КА относительно Земли. Правда, бывают и исключения. Например, на спутниках связи для повышения уровня сигнала и с целью приема качественной информации используется параболическая антенна. Через такую антенну, направляемую на Землю с помощью оптического датчика, ретранслируются телевидение и радиовещание. Это, конечно, не исключает использования на этих ИСЗ малонаправлснных антенн, через которые контролируется состояние служебных систем ИСЗ и передаются команды с Земли. На космических межпланетных станциях, проводящих исследования на сравнительно больших расстояниях от Земли, исчисляемых десятками и сотнями миллионов километров, сигналы с малонаправленных антенн значительно ослабевают. Связь с таким КА можно поддерживать только в медленном темпе, и поэтому, начиная с расстояния порядка 10 млн. км, информация пропускается через остронаправленную параболическую антенну КА. Такие антенны излучают энергию в узком пучке, а не рассеивают ее во все стороны. В сеансах связи параболическая антенна с помощью оптического датчика наводится на Землю так, чтобы Земля находилась в конусе излучения. Передача энергии от передатчика к антенне осуществляется по кабельному тракту, а для сантиметрового диапазона с целью уменьшения потерь — по пустотелому волноводу. Использование на КА нескольких передатчиков, приемников и антенн вынуждает применять в антенно-фидерном тракте антенные переключатели, которые подключают к той или иной антенне работающий передатчик, а резервный передатчик отключают. Эти операции проводятся либо по командам с Земли, либо от бортовых программно-временного устройства или ЭВМ аппарата. Для определения плотности атмосферы исследуемой планеты (например. Марса или Венеры) проводится радиопросвечивание газовых сред или атмосферы планеты. Этот эксперимент может быть осуществлен при радиозаходе КА за планету. Известно, что плотные газовые среды замедляют (хотя и незначительно) скорость распространения радиоволн, причем это замедление растет с увеличением частоты радиосигнала. Поэтому для радиопросвечивания пользуются двумя сигналами: с относительно низкой и с высокой частотами сигнала. В научную аппаратуру, представляющую собой специальное радиопередающее устройство, поступает через направленный отвствитель часть энергии передатчика. В этом устройстве производится умножение частоты сигнала в несколько раз, усиление по мощности и излучение его в направлении на Землю. На наземном пункте принимаются сигналы обеих частот. Основной сигнал увеличивается во столько раз, во сколько второй был увеличен на борту КА, и сравнивается со вторым сигналом. Разность во времени прихода этих сигналов позволяет получить информацию о коэффициенте преломления радиоволн в газовых средах. Подобные измерения, проводимые в течение всего времени захода или выхода КА из-за диска планеты, дают возможность получать высотный профиль концентрации электронов в ионосфере. В антенном тракте применяются фильтры для развязки сигналов на близких частотах. С целью уменьшения энергетических потерь в высокочастотном тракте и для удобства настройки в дециметровом диапазоне часто все высокочастотные элементы (фильтры, переключатели и направленный ответвитсль) объединяют в блок АФУ — блок антенно-фидерного устройства. Система терморегулирования. Научные приборы, радиокомплекс и источник питания обеспечивают работоспособность автоматического КА, но при наличии рабочей температуры на его борту. Температурный режим КА и поддержание его в заданных пределах обеспечивает система терморегулирования. Как мы уже знаем, научная аппаратура, радиокомплекс, вспомогательная и служебная системы КА в процессе работы потребляют электроэнергию. Но, как известно, при потреблении электрической энергии на любом приборе, агрегате или системе происходит выделение тепла. В этом легко убедиться даже в домашней обстановке, если, скажем, слушая радио или просматривая телевизионные передачи, положить руку на верхнюю крышку приемника или телевизора. У длительно работающих устройств рука ощутит более нагретую поверхность по сравнению с окружающими предметами. В земных условиях это тепло в большинстве случаев отводится от приборов по принципу естественной конвекции: нагретый воздух, расширяясь, понижает свою плотность и поднимается вверх. На его место приходит более тяжелый холодный воздух и забирает избыточное тепло от аппаратуры. На автоматическом же КА в условиях невесомости нагретый воздух, находящийся в герметичном отсеке, никуда от аппаратуры не уходит. Следовательно, во избежание перегрева необходимо принудительно его удалять и замещать более холодным. Это делается с помощью вентиляторов, которые приводят в движсние внутреннюю атмосферу автоматического КА. В космическом пространстве при удалении от Солнца на 150 млн. км (район земной орбиты) элементы конструкции автоматического КА, обращенные к Солнцу, могут нагреваться до +150 °C, а находящиеся в тени — охладиться до -120 °C. Существующая аппаратура такой диапазон тепловых условии не выдерживает. Так, например, полупроводниковые элсктрорадиоэлементы при нагреве выше температур +80–90 °C выхолят из строя. А при низких температурах замерзает электролит в химической буферной батарее и прекращается подача электрической энергии. Для нормальной работы приборов и систем создают более узкий диапазон температур от 0 до 30 °C. Поддержание такого интервала температур и возлагается на систему терморегулирования, в которой используются как пассивные, так и активные средства поддержания заданного теплового режима. К пассивным средствам можно отнести окраску наружных поверхностей автоматических КА: подбираются различного цвета краски с определенными оптическими коэффициентами. Поглощение и рассеяние тепла поверхностью характеризуются коэффициентом поглощения и степенью черноты поверхности. И при избытке тепла на автоматическом КА необходимо, чтобы поверхность эффективно излучала тепло и мало его поглощала. А для этого нужно снизить коэффициент поглощения и увеличить степень черноты поверхности. К пассивным средствам терморегулирования относится и изготовление специальных «шуб» — экрановакуумной тепловой изоляции (ЭВТИ). Такая изоляция состоит из 15–30 слоев металлизированной полимерной пленки, переложенных тончайшими слоями стекловаты, причем верхний и нижний слои для прочности выполнены из стеклоткани. ЭВТИ для упрощения технологии изготовления создается из нескольких частей, подобно тому как сшивается из разных частей одежда для человека: рукав, спинка и т. д. Различие только в том, что тепловой «комбинезон» для автоматического КА «сшивается» не заранее, а соединяется из частей непосредственно на самом КА. Тепловая зашита с помощью ЭВТИ заключается в том, что каждый слой металлизированной пленки отражает большую часть теплового потока, а пропускает малую его часть. В итоге поток тепла от Солнца доходит до конструкций в очень ослабленном виде. С теневой же стороны КА «шуба» препятствует уходу тепла в окружающее пространство путем лучеиспускания. Как правило, одних пассивных средств системы терморегулирования недостаточно, особенно для длительно существующих ИСЗ или межпланетных станций. Ведь условия работы последних меняются: тепловой поток с приближением к Солнцу увеличивается, а при удалении — уменьшается. Поэтому приходится использовать активные средства терморегулирования в сочетании с пассивными. Активные средства системы терморегулирования включают в себя два радиатора (холодного и горячего контура), вентиляторы, систему трубопроводов, заслонки с приводами, логические блоки и систему температурных датчиков, размещающихся и различных местах автоматического КА. В зависимости от применяемого рабочего тела сама система может быть воздушной (на станциях «Венера», начиная с "Вснеры-4") или жидкостной (на ИСЗ типа "Молния"). Причем в холодном контуре применяется жидкость, способная оставаться жидкой при низких температурах, в горячем — жидкость с очень высокой температурой кипения. Холодный контур содержит радиатор-холодильник, имеющий большую поверхность, обращенную к теневой части автоматического КА. Горячий контур имеет соответственно рядиатор-нагреватель, обращенный в солнечную сторону. Причем наружная поверхность радиатора-холодильника окрашивается специальной краской с большим значением степени черноты, чтобы интенсивнее рассеивать тепло, тогда как для радиатора-нагревателя краска подбирается с максимальным значением коэффициента поглощения. Трубопроводы после выхода из радиаторов подсоединяются к радиатору-смесителю, через который протекают жидкости обоих контуров. Подачей холодной или горячей жидкости на радиатор-смеситель регулируется его температура. Через этот радиатор продувается вентилятором воздух, поддерживающий заданную температуру внутри автоматического КА. Блок автоматики, получая сигналы от температурных датчиков, регулирует массу горячей или холодной жидкости, направляемой к радиатору-смесителю (путем поворота заслонок в трубопроводах). В воздушных системах терморегулирования также имеются два контура. В холодном — воздух по системе трубопроводов попадает к радиатору-холодильнику, в горячем — протекает через радиатор-нагреватель, расположенный с солнечной стороны. Трубопроводы после радиаторов сходятся вместе, и поток воздуха регулируется заслонкой, способной перскрывать либо горячий, либо холодный поток или смешивать их в любой пропорции. Заслонка с приводом управляется блоком автоматики, к которому сходятся данные от температурных датчиков. Так, например, при понижении температуры внутри отсека температурные датчики выдают сигнал на блок автоматики, который формирует команду на перекладку заслонки. Последняя частично перекрывает поток воздуха от холодильника и увеличивает доступ воздуха от радиатора, нагренаемого Солнцем. В итоге из смесителя идет более теплый воздух. При повышении же температуры заслонка поворачивается в другую сторону. Весь воздушный поток через трубопроводы и смеситель продувается вентилятором, непрерывно функционирующим во время полета автоматического КА. В специфических условиях система терморегулирования несколько видоизменяется. Так, на «Луноходе-1» и «Луноходе-2» лунным днем, длящимся двс земные недели, наблюдался избыток тепла за счет солнечного подогрева и выделения тепла от работающей аппаратуры. Крышка приборного контейнера была открыта, с внутренней стороны на ней наносились элементы солнечном батареи. Верхняя часть корпуса была окрашена краской с малым коэффициентом поглощения и большой степенью черноты поверхности. Тепло, выделявшееся во время сеансов, путем лучеиспускания рассеивалось в пространстве. Лунной ночью задача была прямо противоположной: в темноте движение «Луноходов» не проводилось — КА фактически на 14 сут был законсервирован. При этом осуществлялись только кратковременные сеансы для получения телеметрической информации о значениях температуры в различных местах «Лунохода», давлении в отсеке, работе вентиляторов и т. д. Выделение тепла в этом случае было ничтожно. Крышка «Лунохода» закрьвалась, верхняя часть ее имела поверхность с большим коэффициентом поглощения и малой степенью черноты. Корпус «Лунохода» со всех сторон был закрыт экранно-вакуумной изоляцией, имелась она и на крышке. Но, несмотря на применение пассивных средств, их было недостаточно — аппарат остывал. Для поддержания теплового режима в заданных пределах необходим подвод тепловой энергии. В условиях лунной ночи поверхность Луны остывает примерно до -150 °C. Для поддержания в нормальных температурных условиях работу КА в систему терморегулирования был введен блок обогрева, имеющий в своем составе радиоизотопный источник тепла. Помещенный в блок обогрева еще на Земле, при предстартовой подготовке к запуску автоматического КА, радиоактивный элемент приводил в рабочее состояние данную систему. С этого момента от начала радиоактивного распада шел постоянный поток тепловой энергии, разогревающий блок обогрева до 500 °C. Блок обогрева размещался в небольшом герметичном отсеке, расположенном на кронштейнах вне корпуса «Лунохода». После доставки «Лунохода» на Луну и при наступлении лунной ночи через отсек с помощью двух патрубков осуществлялось прохождение охладившегося воздуха из корпуса «Лунохода» и возвращение обратно по второму патрубку нагретого воздуха (циркуляция воздуха осуществлялась вентилятором). Тепловая энергия от радиоизотопного источника обогревала весь «Луноход», и лунным днем блок обогрева с помощью заслонки, расположенной в патрубке, отсекался от атмосферы корпуса «Лунохода». Чтобы предотвратить перетекание избыточного теплового потока через конструкцию, блок обогрева соединялся с корпусом «Лунохода» через тепловые изоляторы как по кронштейнам, так и по патрубкам. Однако от блока обогрева путем лучеиспускания распространялся поток тепла, и для защиты корпуса «Лунохода» от этого потока на блоке обогрева был установлен параболический зеркальный экран. Он отражал лучистую энергию, идущую в сторону «Лунохода», и рассеивал се в окружающее пространство. В отдельных случаях при создании систем терморегулирования КА приходится учитывать условия, резко отличные от условий космического пространства. Например, при исследовании Венеры от межпланетной станции перед подлетом к планете отделяется спускаемый аппарат, предназначенный для изучения химического состава и физико-механических свойств атмосферы и поверхности планеты. Условия на поверхности Венеры отличаются не только от земных, но и резко отличаются от факторов космического пространства. Температура у поверхности Венеры достигает почти 500 °C, а давление атмосферы — около 90 кг/см2. Мощный натиск давлсния и большого потока тепла заставляет принимать меры для сохранения работоспособности КА в течение времени, достаточного для решения поставленных задач. Перед подлетом к Венере спускаемый аппарат «захолаживается» с помощью системы терморегулирования КА «Венера». По команде с Земли принудительно холодным воздухом температура спускаемого аппарата за 10 сут до подлета плавно понижается до -10 °C (холодный воздух поступает из холодного контура станции). Такое понижение температуры нужно для увеличения срока жизнедеятельности аппаратуры, находящейся внутри спускаемого аппарата при прохождении им атмосферы и после посадки па поверхности Венеры. За 2 сут до подлета, когда понижение температуры спускаемого аппарата заканчивается, он отделяется и летит к планете. При входе аппарата в атмосферу возникают большие перегрузки и сильный аэродинамический нагрев, атмосфера вблизи спускаемого аппарата нагревается до нескольких тысяч кельвинов. Сохранение спускаемого аппарата от этого обеспечивается помещением его в шаровую конструкцию, наружная поверхность которой защищена термостойким покрытием на основе керамического или органического материала с наполнителем. Покрытие при торможении аппарата в атмосфере нагревается до температуры плавления и частично сублимирует, т. е. испаряется. Тогда как конструкция корпуса спускаемого аппарата не нагревается, так как между слоем термостойкого покрытия и конструкцией расположен слой термоизоляционного материала. При уменьшении скорости спуска шаровая конструкция пиросрсдствами делится пополам и отбрасывается, а спускаемый аппарат на парашюте и тормозном щитке опускается на поверхность. Спускаемый аппарат снаружи одет в теплозащитную оболочку толщиной 100–150 мм из искусственного материала, обладающего хорошими теплоизоляционными характеристиками. Под оболочкой находится прочный и герметичный, выдерживающий давление 120 атм металлический корпус, в котором размещена вся научная и служебная аппаратура. Для устройств, проникающих в области с высокой температурой, для относительно длительного сохранения приемлемой температуры, при которой еще функционируют приборы, внутри создают полости, заполненные материалом, имеющим большую удельную теплоемкость. Применяются также материалы со сравнительно низкой температурой фазовых преобразований, т. е. температурой перехода из одного агрегатного состояния в другое, что дает возможность стабилизировать на время температуру без ее повышения. В спускаемом аппарате межпланетной станции «Венера» используется металлический наполнитель для поглощения тепла (бериллий). Для поддержания нормальных условий в месте установки радиокомплекса расположена емкость, заполненная азотнокислым литием. Температура фазовых превращений этого соединения около 30 °C, что дает возможность относительно длительное время стабилизировать температуру и значительно продлить срок активного существования автоматического КА па поверхности Венеры. Система терморегулирования на всех этапах космического полета, т. е. при изменении солнечного излучения (что бывает при перелетах от планеты к планете), при выделении тепла от работы аппаратуры на борту КА и при работе на поверхности планеты в сложных температурных условиях, обязана поддерживать тепловой режим КА в узких пределах, необходимых для сохранения работоспособности всех систем. Следует сказать, что для нормальной работы системы терморегулирования необходимо, чтобы радиатор-нагреватель всегда был обращен на Солнце, а радиатор-холодильник на теневую сторону. В то же время панели солнечных батарей должны освещаться Солнцем, а научная аппаратура направлена на интересующий ученых объект (Луну, планету или звезду). С такой задачей справляется система ориентации. Система ориентации. Космический робот — автоматический КА выполняет задачи по требованию человека и должен на выполнение научной работы смотреть, как сам человек. А что бы стал делать человек-исследователь, оказавшись в космическом пространстве? Первое — это рассмотреть окрестности, правильно выбрать интересующий объект, повернуться в его сторону. Второе — это начать его изучать (визуально или фотографируя), замеряя с помощью приборов интересующие его данные. КА тоже прежде всего должен уметь найти объект, а затем повернуться к нему объективом фотоаппарата или датчиком других научных приборов. На Земле мы поворачиваемся, используя силу трения между ногами и земной поверхностью. Даже на скользком льду, осторожно двигаясь, проскальзывая, но все же разворачиваемся в нужном направлении. В космосе даже сверхскользкой опоры нет — для совершения поворота опереться не на что. Следовательно, приходится обходиться внутренними силами: использовать реактивные силы, возникающие при работе реактивных двигателей. Движение в космосе совершается за счет реактивных сил двигательной установки, и развороты вокруг оси производятся на основе того же принципа. Применение реактивной силы в космосе для осуществления поворота образно можно сравнить со следующим примером. На озере или в пруду стоит лодка, приставшая бортом к пристани. Если с кормы лодки на пристань прыгнет человек, то от толчка его ноги корма отойдет и лодка будет разворачиваться. В космосе прыгает не человек, а выбрасываются через сопло продукты сгорания топлива или заранее запасенный газ. В противоположную сторону будет отходить та часть автоматического КА, где расположен микродвигатель. В итоге КА начнет разворачиваться вокруг центра масс. Микродвигатели располагают таким образом, чтобы вращение аппарата можно было осуществить по трем взаимно перпендикулярным осям. С целью создания большего момента малой силой тяги микродвигатели располагают на выносных штангах или на концах панелей солнечных батарей. Система ориентации автоматического КА в продолжение всего полета решает ряд задач. Если предоставить КА самому себе, то он с самого начала полета не будет оставаться в покое, а начнет беспорядочно кувыркаться. Это происходит вследствие того, что во время отделения от ракеты-носителя КА отталкивается от нескольких точек крепления. Малейшая разница в силах дает момент на закрутку: даже разница в силах трения в шариковых замках при расцепке ведет к развороту и вращению космического аппарата. Малые силы не могут сильно раскрутить тяжелый аппарат, но даже плавное, медленное вращение со скоростью несколько угловых градусов в минуту не позволит нормально функционировать целому ряду систем. Одними из задач системы ориентации являются успокоение и стабилизация КА после отделения. Кроме того, система ориентации решает следующие задачи: поиск Солнца и приведение КА в заданное положение, поиск и ориентация на звезду, обеспечение проведения радиосвязи с помощью остронаправленной антенны, стабилизация КА для проведения коррекции, торможения или сеанса фотографирования и т. д. Успокоение КА после отделения от ракеты-носителя можно осуществить различными методами. Стабилизация с помощью оптического датчика предполагает наличие оптического прибора, способного определить направление на источник света. Солнце в качестве источника света создает в фотоэлементе электрический ток, и при отклонении от направления на Солнце уменьшается величина тока. Ослабление сигнала анализируется логическим блоком и формирует команду на возвращение КА к прежнему положению. Можно стабилизировать ИСЗ, используя гравитационное поле Земли. Предположим, что на орбите находится гантель — два шарообразных груза, соединенных жесткой и прочной перекладиной, более легкой, чем грузы. Через некоторое время эта гантель своей осью, проходящей через грузы, повернется к центру Земли. В таком положении ближний к Земле шар гантели будет притягиваться сильнее, чем дальний. Если же гантель займет иное положение, т. е. ось отклонится от направления на центр Земли, то возникнет вращательный момент, который пропадет только тогда, когда ось гантели будет направлена к Земле. Если КА выполнить в виде гантели, то он без дополнительных стабилизирующих устройств сам повернется осью к центру небесного тела, спутником которого является. Существуют и другие способы стабилизации, например, с помощью давления солнечного света; гироскопическая, когда стабилизация по одной оси осуществляется вращением всего КА, и т. д. На современных КА чаще всего применяется система ориентации, использующая в качестве чувствительных элементов оптические датчики — «глаза», а исполнительными органами служат реактивные микродвигатели. В состав таких систем входят оптические датчики постоянной ориентации на Солнце, датчики точной ориентации на Солнце, датчики постоянной ориентации на звезду, прибор ориентации на Землю, блок датчиков угловых скоростей, усилители, блок автоматики пневмосистсмы и т. д. Как уже отмечалось, в качестве чувствительных элементов служат оптические датчики-фотоэлементы, способные улавливать свет и преобразовывать его в электрический ток. На некоторых автоматических КА. например «Прогнозах», ориентация осуществляется по одной оси, направленной на Солнце. В этом случае достаточно одного датчика. ИСЗ «Прогноз» необходима только одноосная ориентация, с тем чтобы солнечные батареи освещались Солнцем. Приборы, изучающие Солнце, устанавливаются на верхней части ИСЗ и всегда освещены светилом. На противоположной стороне ИСЗ размещены приборы, предназначенные для изучения процессов, происходящих в земной магнитосфере. Точность ориентации в этом случае может быть и невысокой — в пределах нескольких угловых градусов. Оптические датчики применимы с меньшей точностью, но с постоянной ориентацией на Солнце. С целью уменьшения расхода рабочего тела ИСЗ закручивают. Закрутка производится вокруг оси, направленной на Солнце, после выведения ИСЗ на орбиту и успокоения его. Гироскопическая стабилизация, как волчок, вращающийся на полу, длительное время удерживает ось вращения в одном направлении. Для некоторых КА требуется более точная ориентация и по трем осям. В этом случае на КА, помимо солнечного точного датчика, ставится прибор точной постоянной ориентации на определенную звезду. Первоначально с помощью менее чувствительного солнечного датчика захватывается Солнце. Разворот КА производится исполнительными органами системы ориентации. После захвата Солнца открывается крышка звездного датчика и путем поворота вокруг оси, обращенной на Солнце, запоминаются все попадающиеся в датчик звезды. При втором обороте вращение прекращается при попадании в датчик наиболее яркой звезды (как правило, в качестве звездного ориентира иыбирается Канопус или Сириус). Крышка у звездного датчика нужна для предохранения от засветки Солнцем и чтобы избежать порчи чувствительного элемента, настроенного на освещенность от звезды-ориентира. Ведь освещенность от Солнца, находящегося в зените, даже сквозь толщу земной атмосферы составляет 200 тыс. люкс, а освещенность от звезды — лишь доли люкса. Чувствительными элементами как в звездном, так и в солнечном датчиках являются фотоэлементы. При попадании на них света они выдают электрический ток, являющийся сигналом прекращения разворота автоматического КА. Вокруг центрального фотоэлемента размещают несколько периферийных, и при появлении возмущающего момента, т. е. поворота КА, в одном из них появляется сигнал. Логический блок системы ориентации при появлении сигнала с помощью блока автоматики пневмосистемы даст команду на тот исполнительный орган, который возвращает солнечный или звездный «зайчик» в центральную зону. Тем самым КА с высокой точностью выдерживает заданное направление своих осей в пространстве. Стабилизация КА в заданном положении осуществляется периодической работой исполнительных органов. В качестве последних используются микрореактивные двигатели. Рабочим телом здесь служит, как правило, сжатый газ, реже — олнокомпонентное топливо (например, перекись водорода) или двухкомпонентное самовоспламеняющееся топливо (например, диметилгидразин и азотная кислота). Доступ рабочего тела — сжатого газа в сопло микродвигателя производится с помощью электропневмоклапанов. По сигналу от блока автоматики пневмосистемы электропневмоклапан срабатывает, открывая доступ рабочему телу, а через короткий промежуток времени вновь закрывается. Для компенсации возмущающих моментов, возникающих на автоматическом КА от различных причин, электропневмоклапаны могут срабатывать многократно в зависимости от величины возмущающего момента. Для ориентации КА применяются и другого типа двигатели, такие, как, например, ионные или плазменные. На автоматическом КА «Зонд-3» использовался плазменный двигатель, а в качестве рабочего тела — фторолоновый цилиндр, надетый на центральный электрод. При разряде от емкостной батареи, проходящем от центрального электрода на внешний корпус, испарялась незначительная часть рабочего тела. За счет высокой температуры разряда образовывалась плазма, которая выбрасывалась из двигателя со скоростями истечения до нескольких километров (~15 км) в секунду. Развороты автоматического КА в пространстве относительно центра масс КА нужны не только для проведения сеанса научных исследований, но также и для проведения коррекции его движения по орбите. В зависимости от величины и направления погрешности выведения разворот может быть произведен практически в любом направлении. Система ориентации обеспечивает разворот автоматического КА в заданном направлении с некоторой погрешностью. Точность ориентации в количественном отношении для тех или иных КА может быть различной. 'Так, например, для межпланетной станции «Венера» величина расхождения между заданным направлением и фактически получившимся может достигать 5 , а стабилизация, т. е. удержание КА около фактического направления, составляет (с плавными колебаниями в ту или другую сторону) до 3 . Для КА «Астрон», предназначенного для изучения ультрафиолетового излучения звезд, такая точность мала. Для изучения таких малых объектов, как звезды, ориентация и стабилизация должна быть не хуже 1". КА «Астрон» создан на базе межпланетной станции «Венера», на которой установили ультрафиолетовый телескоп. Выполненный по схеме Кассегрена, он имеет основное зеркало диаметром 0,8 м, его вторичное зеркало поворачивается при помощи двух приводов с точностью ориентации и стабилизации (т. е. удержания звезды в фокусе телескопа) около 1". В этом ИСЗ применяется двухконтурная система ориентации: первый контур обеспечивает относительно грубое наведение КА с той же точностью, как и станцию «Венера», второй контур — точное наведение с использованием ультрафиолетового телескопа. ИСЗ «Метеор» обладает системой ориентации, которая дает постоянное направление вертикальной оси этого КА на центр Земли (что обеспечивается датчиками инфракрасной вертикали). Успокоение ИСЗ после выведения на орбиту производится с помощью исполнительных органов — реактивных сопел, работающих в импульсном режиме на сжатом азоте. В процессе полета исполнительными органами уже являются электродвигатели-маховики, оси которых совпадают с осями ИСЗ. В отличие от других ИСЗ в «Метеоре» панели солнечных батарей закреплены на осях и могут вращаться относительно вертикальной оси КА. Кроме того, они имеют возможность поворачиваться вокруг второй оси, перпендикулярной первой. Поворот панелей солнечных батареи осуществляется собственной системой ориентации, состоящей из оптических датчиков и электродвигателей. Система ориентации, система терморегулирования и другие служебные системы должны функционировать слаженно, целеустремленно. Поэтому и руководит работой КА одна из важных его систем, мозг космического робота, — система управления. Система управления. Автоматические КА, предназначенные для проведения сложной научной программы (например, для исследования планет и других небесных тел), а также имеющие многоплановые задачи, снабжаются системой управления. Она уже по своему названию предопределяет управление почти всеми системами КА и, в частности, решает такие задачи, как обеспечение угловой стабилизации и стабилизации центра масс КА при выведении его на орбиту ИСЗ, при полете по этой орбите, а также при выводе КА на траекторию полета к планете. Так, например, система управления обеспечивает стабилизацию КА при работе корректирующе-тормозной двигательной установки в сеансах коррекции и торможения, суммирует приращение скорости для формирования главной команды на отключение корректирующе-тормозной двигательной установки. Кроме того, система управления на основе памяти ЭВМ (программы) создает разворот автоматического КА, используя исполнительные органы системы ориентации. Контроль за правильностью разворота осуществляется с помощью трехосной гиростабилизированной платформы. Все эти операции проводятся в сеансах как коррекции, так и торможения и фотографирования. Строго по меткам времени система управления выдает команды на включение различных систем КА с целью успешного выполнения маневра на орбите, производит введение различных программ в память ЭВМ, их контроль и хранение. Система управления состоит из различных приборов и входящих в нее сложных подсистем. К ним относятся бортовые цифровые вычислительные машины, автомат стабилизации и различные подсистемы (приведения, обогрева, космической астронавигации, регулирования кажущейся скорости и т. д.). Для проведения коррекции орбиты КА предварительно, за 1 или 2 сут, проводится сеанс связи, при котором в память ЭВМ вводится программа. В ней задаются величины углов для разворота по трем перпендикулярным осям, величина скорости, получаемой КА от работы двигательной установки. Главное — вся программа жестко увязана по времени: задано время совершения разворота по той или иной оси, время окончания разворотов, точное время включения двигательной установки и целый ряд других данных, необходимых для проведения правильных и согласованных действий различных систем КА. Во время проведения сеанса коррекции перед пуском корректирующе-тормозной двигательной установки система ориентации ориентирует КА в пространстве (по заложенной в ЭВМ программе) по угловым значениям разворотов по всем трем осям. Затем, при раскрутке роторов гироскопов, обеспечивается сохранность заданного положения автоматического КА в пространстве относительно его центра масс. При этом система ориентации отключается и стабилизация осуществляется от гиростабилизированной платформы. Разворот КА требуется для придания двигательной установке требуемого направления для проведения коррекции. ЭВМ из своей памяти выдает в точно рассчитанное время команду на включение двигательной установки, интегратор системы управления суммирует приращение скорости и при достижении заданной всличины выдаст команду на выключение двигательной установки. Спустя некоторое время КА по программе ЭВМ вновь с помощью системы управления возвращается в первоначальное положение. Радиаторы системы терморегулирования и солнечная батарея вновь занимают правильное положение относительно Солнца. Система управления КА на различных участках траектории полета выполняет задачи по управлению движением его центра масс, т. е. движением собственно автоматического КА — изменением скорости движения по траектории полета и изменением направления движения (коррекции траектории полета, переход с пролетной траектории на орбиту спутника планеты и т. д.). Управление же движением КА относительно центра масс (развороты и вращение КА) — это задача ориентации, и с этим как раз и справляется система ориентации. Только в сеансах коррекции, торможения и некоторых других специфических условиях полета система управления, как правило, решает эти задачи. Система ориентации в этих случаях отключается, но ее исполнительные органы продолжают работать. Система управления решает также задачу по запланированному входу КА в атмосферу планеты с допустимыми перегрузками. Так, спускаемый аппарат ИСЗ (например, биологического) после полета по околоземной орбите с первой космической скоростью, равной примерно 8 км/с, под малым углом входит в атмосферу. При спуске по баллистической траектории КА испытывает перегрузку в 8-10 g. Если же вход в атмосферу происходит под большим углом, то перегрузки становятся еще больше из-за резкого торможения. Так, например, при входе со второй космической скоростью спускаемого аппарата станции «Вснсра-4» в атмосферу Венеры под большим углом перегрузки достигали около 400 g. В то же время возвращаемый аппарат автоматической станции «Зонд» после облета Луны входил по баллистической траектории в атмосферу Земли со скоростью входа около 11 км/с. Посадка в заданном районе и приемлемый режим аэродинамического торможения-с перегрузками 10–16 g стали возможны благодаря совершенству и точности работы системы управления. Последняя с большой точностью обеспечила условия входа в атмосферу Земли пол углом 5–6° к плоскости местного горизонта. Для межпланетных станций система управления выполняет сложные действия по разделению частей автоматического КА и управляет их дальнейшим движением. Так, например, станция «Венера-10» за 2 сут до подлета к планете должна была отделить спускаемый аппарат (рис. 2). Полет при этом происходил по «попадающей» траектории, т. е. станция сближалась с Венерой и вошла в ее атмосферу (что для спускаемого аппарата было даже и необходимо). Но затем орбитальный отсек станции, отделив спускаемый аппарат по команде, поступившей от системы управления, развернулся. В расчетное время система управления включила двигательную установку на заданный интервал времени, позволивший осуществить переход на новую пролетную траекторию. 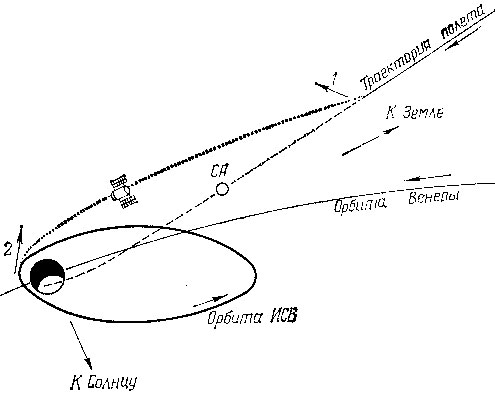 Рис. 2. Схема подлета станции «Венера-10» к планете (1 — импульс для увода станции после разделения ее со спускаемым аппаратом; 2 — импульс торможения для вывода КА на орбиту спутника планеты) Работа двигательной установки осуществлялась с некоторой погрешностью, да и расстояние до планеты было измерено с определенной степенью точности, и поэтому выход станции к планете лежал в определенных пределах расстояний до се поверхности. Управлять с Земли разворотом подобной станции и определять величину тормозного импульса было затруднительно, так как расстояние от станции до Земли составляло порядка 70 млн. км, а радиосигнал этот путь проходит в течение почти 4 мин. Поэтому-то решение задачи управления было возложено на космический робот. Следует сказать, что и системе управления «Венеры-10» имелась система космической астронавигации, которая с помощью оптического датчика определяла направление на центр планеты и запоминала направление движения станции. Бортовая цифровая вычислительная машина непрерывно определяла координаты станции, расстояние до планеты и необходимую величину тормозного импульса для создания искусственного спутника Венеры. Определялось расчетное время включения двигательной установки в момент пролета через перицентр, рассчитывались углы разворота станции, приводящего к положению двигательной установки соплом против движения КА. В строго расчетное время была включена (от системы управления) двигательная установка. После набора необходимой для торможения скорости двигатель выключился, и станция перешла на орбиту искусственного спутника Венеры. Спускаемый же аппарат в процессе спуска в атмосфере опустился на поверхность планеты и передал научную информацию на станцию, которая ретранслировала сигнал через остронаправленную антенну на Землю. Двигательная установка. Изменение орбиты, управление движением центра масс аппарата система управления осуществляет благодаря двигательной установке. При полете на планеты Солнечной системы точность выведения КА на орбиту зависит от качества и точности изготовления всех элементов ракеты-носителя, от точного соотношения компонентов топлива, строго стабильной температуры горючего и окислителя и множества других факторов. При разработке мер по повышению точностей резко возрастает стоимость изготовления ракеты и требуется очень много усилий со стороны огромного коллектива изготовителей и эксплуатационников. Снижение затрат и усилий, некоторое понижение точности изготовления приводят к тому, что выведение автоматического КА на траекторию полета осуществляется с определенными погрешностями. Например, для межпланетной станции «Венера» допустимый промах в районе планеты Венера — до 300 тыс. км. С целью обеспечения прилета в строго заданную точку пространства относительно планеты возникает необходимость в проведении коррекции траектории полета. Ее можно проводить практически на любом участке траектории полета КА: в начале пути, в середине или в конце полета. Энергетически выгоднее, однако, производить две коррекции траектории полета: первую — в начале пути, а вторую — за 10–15 сут до подлета к планете. Коррекция траектории полета, осуществляемая в начале пути, дает в итоге большое отклонение у цели при небольшом импульсе. Упрощенно это можно представить себе следующим образом. При промахе в 1000 км коррекцию траектории полета в начале пути можно провести увеличением скорости движения перпендикулярно направлению полета величиной всего на 1 м/с. Такой промах при полете до Венеры ликвидируется: полет до Венеры длится 4 мес. (или 1036800 с), и за это время по одному метру в секунду набегает 1036,8 км. При коррекции в середине пути необходим уже импульс в 2 м/с, т. е. в 2 раза больше, а при коррекции за 1000 с до подлета уже требуется импульс более 1 км/с, что в 1000 раз больше. Ошибки, допущенные при коррекции в начале пути, многократно увеличиваются при прилете, кроме того, необходимо очень точное определение истинной траектории полета, чтобы выявить с высокой точностью погрешности. Итак, коррекция, проводимая у цели, при большой ошибке потребует большого количества топлива. Но здесь выполнение коррекции точнее, поскольку накопление ошибок не происходит из-за малого времени, оставшегося для полета до цели. Поэтому напрашивается компромиссное решение: проведение двух коррекций — в начале пути (для исправления большей части погрешности выведения) и в конце пути (для повышения точности прилета в заданную точку относительно планеты-цели). При этом достигается и высокая точность, и сравнительно небольшой расход топлива. Для проведения коррекции траектории полета на автоматическом КА устанавливается корректирующая двигательная установка (КДУ). Иногда она совмещает и функции торможения для осуществления мягкой посадки или создания искусственного спутника планеты, и в этом случае она называется КТДУ — корректирующая тормозная двигательная установка. КТДУ — сложная система, в которую входят: топливные баки, система опорожнения баков, пневмогидравлическая система, рабочее тело для вытеснения топлива, турбонасосный агрегат и двигатель с системой стабилизации. Количество топливных баков может быть два (с окислителем и горючим) или один (с унитарным топливом, например с перекисью водорода). В невесомости топливо в баках может занимать любое безразличное положение и даже равномерно перемешиваться с газовой подушкой, предназначенной для вытеснения топлива в двигатель при открытом клапане. Если такая смесь топлива и газов попадет в двигательную установку, послсдняя, как правило, отключается. С этой целью на камере сгорания установлен датчик давления, и при попадании газового пузыря в камере снижается давление вследствие уменьшения количества топлива. В этом случае датчик срабатывает и выключает двигатель, чтобы предотвратить прогорание камеры сгорания. Для надежного включения двигательной установки необходимо либо механически разделить жидкость и газы, либо предварительно создать перегрузку, с тем чтобы топливо прижалось к заборной (заправочной) горловине, а газы, способствующие вытеснению топлива, поднялись бы в противоположное направление. Разделение жидкости и газов при вытеснении топлива из баков может обеспечиваться путем использования мешков из синтетических материалов: внутрь мешков помещают топливо, а снаружи давлением газа вытесняют его в магистраль, ведущую к двигателю. Вместо мешка также применяют гибкую металлическую мембрану, перемешающуюся давлением газа. Вес эти различные устройства потребовались для подачи топлива без газовых пузырей. Для включения двигательной установки необходима специальная автоматика, и в качестве такой автоматики служит пневмогидравлическая схема. Она представляет собой систему трубопроводов, пневматических и гидравлических клапанов и другого оборудовании, предназначенного для осуществления задачи по запуску двигателя. Эта схема производит продувку магистралей, открытие клапанов, позволяющих осуществить свободный проход компонентов топлива из баков к двигателю, запускает газогенератор. Последний предназначен для выработки газа из компонентов топлива, чтобы привести во вращение турбонасосный агрегат (ТНА). Именно он под давлением гонит топливо в двигатель и производит включение двигательной установки. Рабочим телом для вытеснения топлива из баков на автоматическом КА, как правило, служит запас сжатого воздуха или технического азота в баллонах высокого давления (порядка 200 атм). ТНА размещается вблизи двигателя и приводится в движение продуктами сгорания топлива (оно сгорает в специальном газогенераторе), а затем газ поступает на лопатки турбины. На одной оси с турбиной насажены рабочие колеса центробежных насосов горючего и окислителя, и насосы под давлением нескольких десятков атмосфер подают топливо к форсункам двигателя. Через форсунки топливо впрыскивается в камеру сгорания. Применение самовоспламеняющегося топлива при соприкосновении компонентов позволяет обходиться без зажигательных устройств. Топливо сжигается в камере сгорания, и продукты горения через критическое сечение выбрасываются в сопловую часть, создавая тягу. Двигатели, как правило, допускают многократный запуск, позволяя проводить несколько коррекций и торможение автоматического КА для создания искусственного спутника планеты или осуществления мягкой посадки. При работе двигателя может возникнуть опрокидывающий момент, стремящийся закрутить КА вокруг центра масс. Такое происходит, например, в результате погрешностей при установке двигателя, т. е. когда направление тяги проходит не точно через центр масс КА, а с небольшим отклонением. Для компенсации возмущающего момента или стабилизации камера сгорания с соплом (или весь двигатель) имеет возможность поворачиваться в кардановом подвесе вокруг двух взаимоперпендикулярных осей. Поворот всего двигателя или его камеры сгорания с сопловым аппаратом по этим двум осям осуществляется с помощью специальных электромеханических приводов — так называемых рулевых машинок. С самого начала разворот КА может почувствовать гироскоп — быстровращаюшийся вокруг оси симметрии ротор (простейший его аналог — волчок). Трехстепснной гироскоп в кардановом подвесе может менять положение своей оси, поворачиваясь вокруг трех взаимно перпендикулярных осей. Разметенные относительно них три потенциометра дают нулевой потенциал при первоначальном заданном положении гироскопической оси. При отклонении корпуса автоматического КА относительно его центра масс даже на незначительный угол с потенциометра снимается определенной величины ток. А величина этого тока зависит от величины угла отклонения. По конкретному потенциометру логическое устройство может определять, в каком направлении отклонился корпус автоматического КА, вращаясь вокруг центра масс. Снимаемый же с потенциометра ток усиливается, чтобы с достаточной мощностью поступить на ту рулевую машинку, которая отклоняет двигатель в соответствующую сторону для компенсации возмущающего поворота КА относительно центра масс. Для своевременного отключения двигателя после достижения КА заданного импульса, т. е. заданного приращении скорости автоматического КА, в системе управления есть акселерометр. Этот прибор суммирует ускорение КА, создаваемое двигателем, по времени его работы, тем самым определяя конечную скорость, достигнутую автоматическим КА. После достижения заданной скорости от акселерометра проходит команда на выключение двигателя. При этом происходит закрытие клапанов в трубопроводах горючего и окислителя, доступ топлива в двигатель прекращается и двигатель выключается. Мы рассмотрели жидкостный ракетный двигатель, создающий тягу за счет сгорания химического топлива, превращения его в газы и истечения последних из сопла. Такие двигатели наиболее широко применяются в космонавтике. К химическим двигателям относятся и твсрдотопливные ракетные двигатели, и команда на запуск твердотопливного двигателя поступает тоже от системы управления. Подобные двигатели применяются для разделения ступеней ракеты-носителя, для раскрутки ракетных ступеней и КА с целью их стабилизации в полете, для создания начальных перегрузок для нормального запуска жидкостного двигателя в невесомости и т. д. На КА твердотопливные двигатели могут применять и в качестве вспомогательных двигателей. Примером может служить межпланетная станция «Марс-2», на которой установлено несколько твердотопливных двигателей, предназначенных для выполнения различных задач. Так, при подлете, к Марсу система управления разворачивала межпланетную станцию спускаемым аппаратом в сторону планеты. Траектория полета пролегала вблизи Марса на расстоянии в перицентре около 1000 км от поверхности (рис. 3). За несколько часов до подлета в расчетное время отделился спускаемый аппарат, снабженный твердотопливньм двигателем увода аппарата на траекторию попадания в планету. 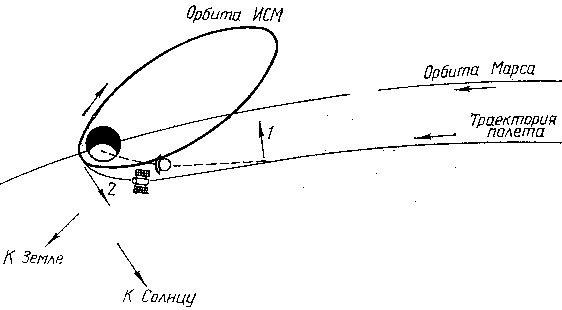 Рис 3. Схема подлета станции «Марс-3» к планете (1 — импульс для увода станции после разделения ее со спускаемым аппаратом; 2 — импульс торможения для вывода КА на орбиту спутника планеты) После окончания работы этого двигателя спускаемый аппарат с помощью автономной системы управления развернулся аэродинамическим конусом вперед по направлению полета. Небольшие твердотопливные двигатели, установленные на аэродинамическом конусе, произвели раскрутку спускаемого аппарата, что было необходимо для сохранения ориентации спускаемого аппарата относительно планеты (вход в атмосферу должен был осуществляться аэродинамическим конусом вперед). Перед входом в атмосферу с помощью твердотопливных двигателей была прекращена гироскопическая стабилизация, чтобы предохранить от закрутки стропы парашюта. Затем на спускаемом аппарате последовательно сработала целая серия твердотопливных двигателей. После значительного снижения скорости в результате аэродинамического торможения с помощью одного из таких двигателей была введена в действие парашютная система. На небольшой высоте над поверхностью сработал двигатель увода парашютной системы, чтобы случайно парашют не накрыл находящийся на поверхности планеты спускаемый аппарат. Наконец сработали двигатели мягкой посадки, а при касании поверхности включились последние твердотопливные двигатели — так называемые двигатели увода системы мягкой посадки. Кроме химических двигательных установок, прорабатываются и испытываются с целью применения на КА двигатели ядерные, ионные, плазменные и так называемый "солнечный парус". Значительное внимание в настоящее время уделяется двигателям малой тяги. Это двигатели, выбрасывающие сравнительно небольшое количество вещества и поэтому способные развить только ничтожное ускорение, в сотни и тысячи раз меньше ускорения земной тяжести. Для старта КА с Земли они непригодны, но в полете, после выведения КА на орбиту, роль этих двигателей велика. В качестве таких двигателей могут применяться ионные и плазменные. В ионном двигателе разгон рабочего тела — облака ионов — производится холодным способом. Пары легко ионизируемого металла (цезия или рубидия) поступают в ионизатор, где атомы, теряя электрон, превращаются в ионы. Затем ионы электрическим полем разгоняются до колоссальных скоростей в специальном электростатическом ускорителе. Однако просто выбросить эти ионы из сопла двигателя нельзя, поскольку образующееся позади двигателя облако из положительных ионов станет препятствовать выбросу новых положительно заряженных частиц. Поэтому для ионного двигателя предусмотрено устройство для нейтрализации ионов потоком электронов. В итоге из сопла ионного двигателя будет выбрасываться в пространство электрически нейтральная струя. Плазменные двигатели используют плазму — газ, состоящий из ионов и электронов. Плазма — хороший проводник электричества, и струю плазмы можно разогнать магнитным или электрическим полем до очень высоких скоростей истечения из сопла. Двигатель типа "солнечного паруса" использует давление солнечного света. На Земле оно никак себя не проявляет, поскольку величина его ничтожна: на каждый 1 м2 земной поверхности солнечные лучи давят с силой около 1 мгс. Однако при использовании же "солнечных парусов", легких, из тонкой пленки и размером в сотни квадратных метров, возникает сила, достаточная для воздействия на КА. Двигатели малой тяги могут работать очень долго, длительное время и постепенно разгоняя КА для полетов к другим планетам. Двигатели малой тяги, в которых используется химическое топливо, применяются сейчас и для коррекции орбиты ИСЗ, находящихся на стационарной орбите. Система разделения. Автоматические КА, предназначенные для выполнения комплексных задач (скажем, исследования атмосферы и поверхности планет), а также для надежной передачи полученного объема научной информации на Землю, могут проводить работы с помощью разделяющихся частей. Например, спускаемый аппарат станции «Венера» с помощью парашютной системы опускается в атмосфере планеты и производит изучение химического состава газовой оболочки планеты, ее температуры и давления, скорости ветра, освещенности и т. д. В это же время орбитальный отсек станции пролетает мимо планеты или выводится на орбиту спутника Венеры. Задача орбитального отсека КА — принять сигнал со спускаемого аппарата, усилить его, записать в запоминающем устройстве и передать на Землю с помощью остронаправлснной антенны. Но, кроме того, он может проводить и самостоятельно научные исследования с орбиты искусственного спутника Венеры или при пролете около планеты. Для разделения межпланетной станции на части и служит система разделения. Спускаемый аппарат и орбитальный отсек с момента выведения и в течение всего перелета до Венеры, длящегося примерно 4 мес., существуют как единое целое, связанное множеством электрических кабелей и пневматических трубопроводов. Электрические кабели необходимы для проведения контроля состояния всех систем спускаемого аппарата, а для поддержания заданной температуры в спускаемом аппарате система терморегулирования КА по трубопроводам гонит воздух определенной температуры и поддерживает заданный температурный режим в спускаемом аппарате. При разделении подается команда на пироножи резки кабелей и труб. Экранно-вакуумная тепловая изоляция в месте стыка спускаемого аппарата с орбитальным отсеком сшита нитками пониженной прочности, так чтобы при разделении они быстро порвались и многослойная экранно-вакуумная тепловая изоляция спускаемого аппарата отделилась от теплоизоляции орбитального отсека. Перед резкой труб клапаны, находящиеся в трубопроводах, закрываются и внутренние полости спускаемого аппарата и станции герметизируются. Трубопроводы разрезаются с помощью удлиненного заряда, проложенного вокруг трубы. Он представляет собой длинную металлическую трубку диаметром 5–8 мм, наполненную бризантным (т. е. способным гореть с большой продольной скоростью — до нескольких тысяч метров в секунду) взрывчатым веществом типа тола. Вдоль трубки в виде треугольной насечки сделан клинообразный разрез, несколько недоходящий до осевой линии трубки. При подрыве взрывчатого вещества возникает кумулятивный эффект, вдоль разреза образуется мощная плоская струя раскаленных и очень плотных газов. Если таким удлиненным зарядом опоясать трубопровод, то при подрыве пиропатрона (являющегося детонатором) срабатывает заряд и огнем газового ножа мгновенно перерезается трубопровод. Сведенные воедино кабели перерезаются ножом гильотинного типа с помощью пирозаряда. Сам спускаемый аппарат крепится к станции с помощью широких и относительно толстых металлических лент. Их крепление осуществляется пироболтами, и при подрыве болты перерезаются и освобождают ленты. Спускаемый аппарат отталкивается пружинным толкателем, и происходит разделение. |
|
|||
|
Главная | Контакты | Прислать материал | Добавить в избранное | Сообщить об ошибке |
||||
|
|
||||